- My cart
- Prices in: USD
Show prices in:
- Exchange $: 45.4uah
- UA RU EN
Forgot your password?
Authorization withGoogle





Authorization withGoogle
Show prices in:


Bonuses will be issued for this product upon purchase
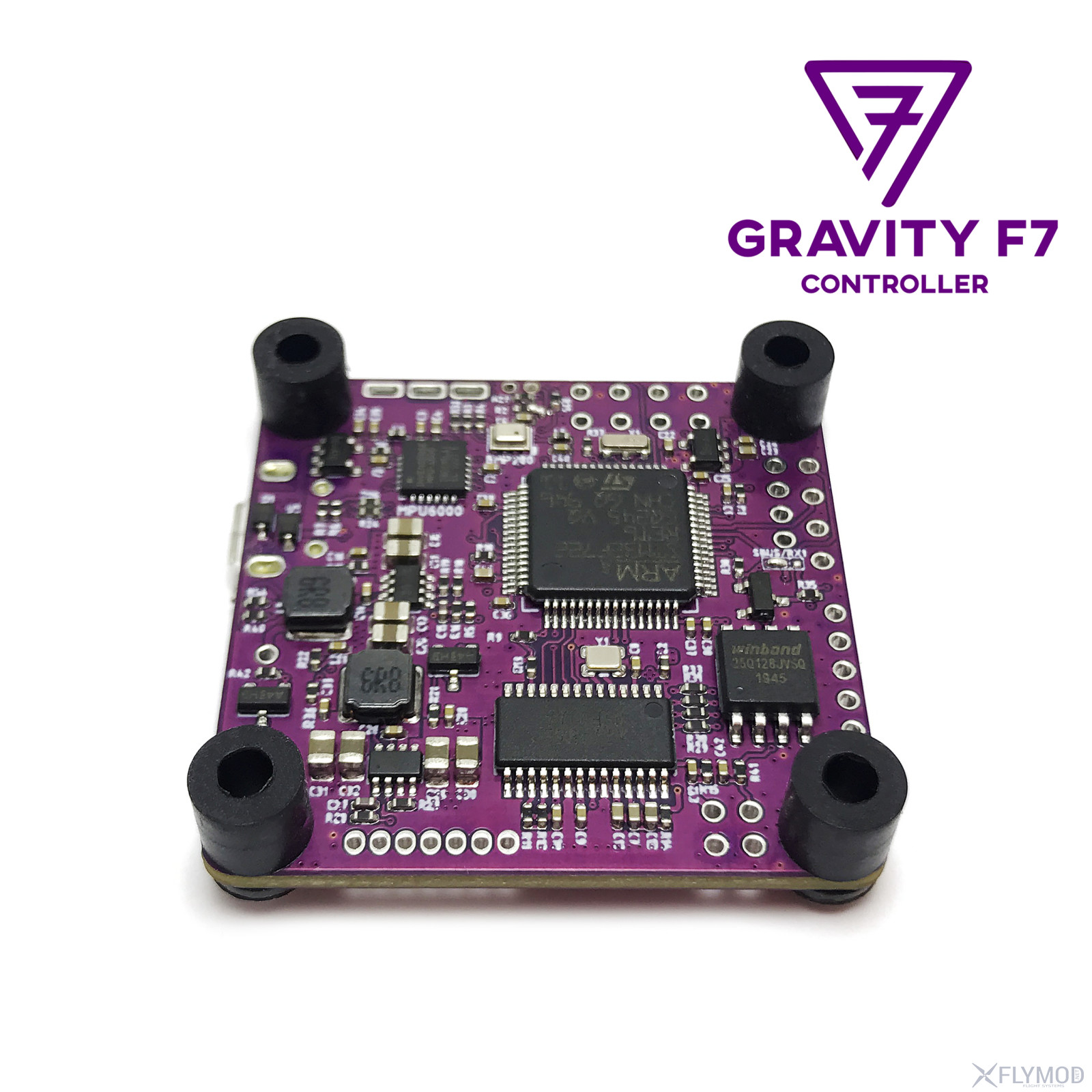
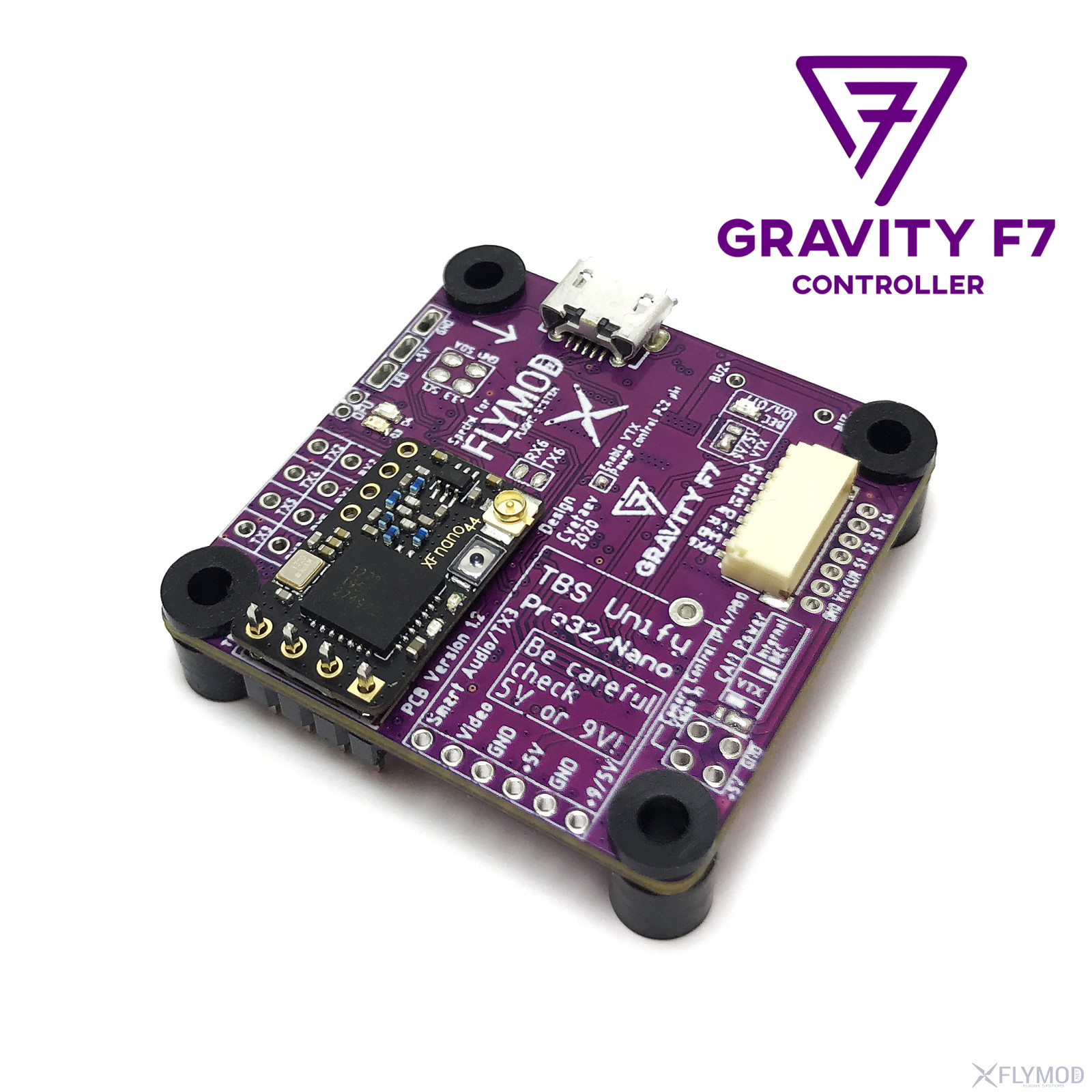
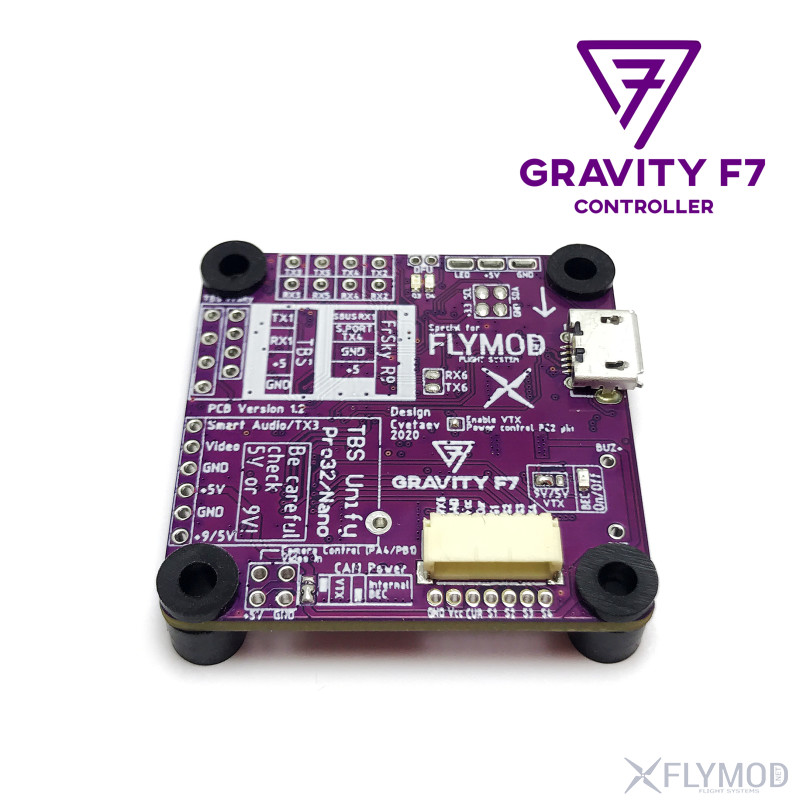
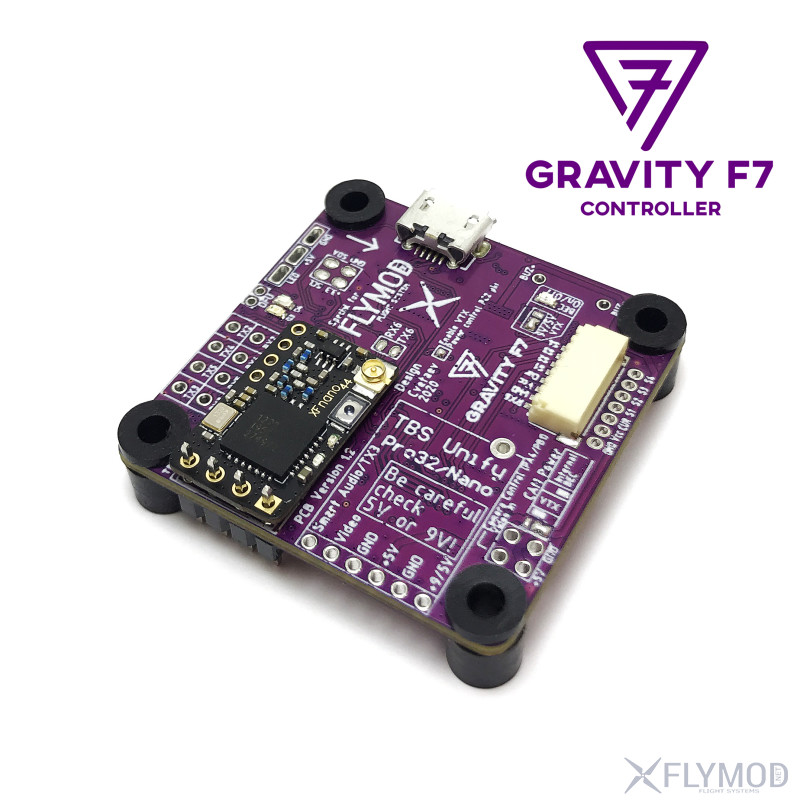
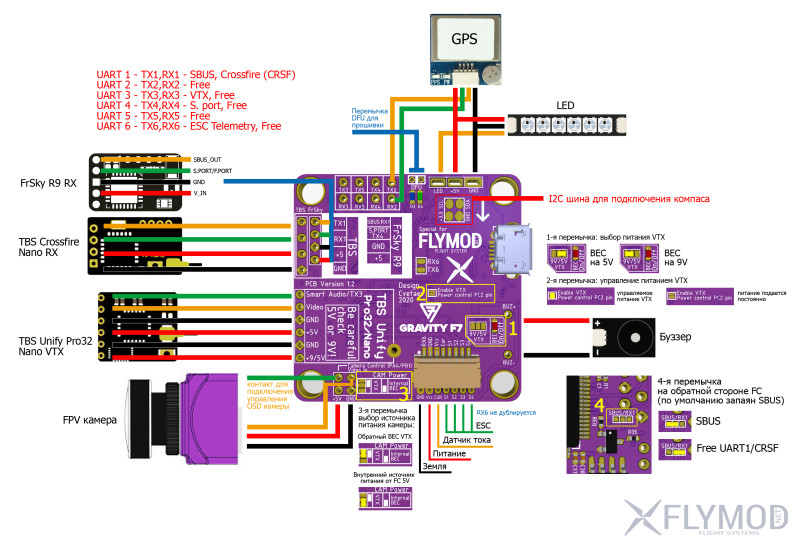
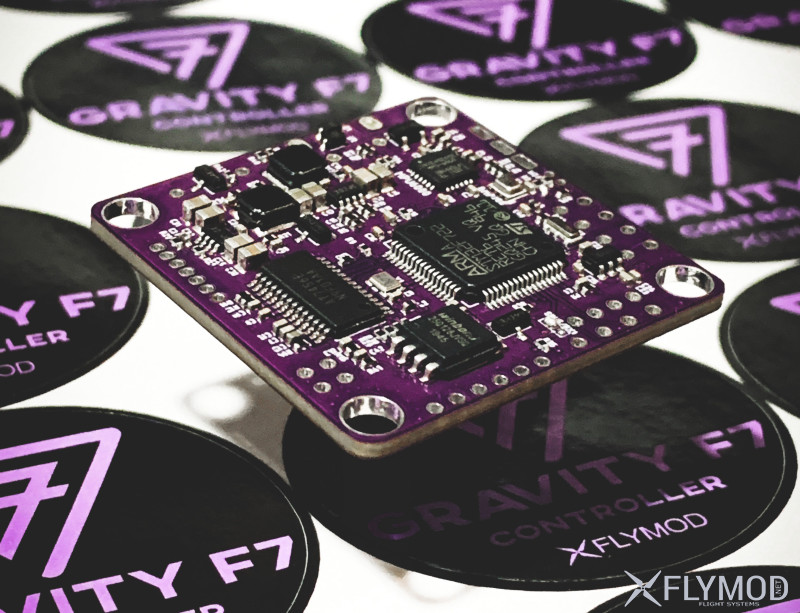
Read moreFlymod Gravity F7 flight controller, designed in Ukraine for the needs of Ukrainian FPV pilots. The controller is perfectly compatible with video transmitters and receivers from TBS, which allows for a clean and beautiful installation. Designed for FPV racing quadcopters and other similar drones.
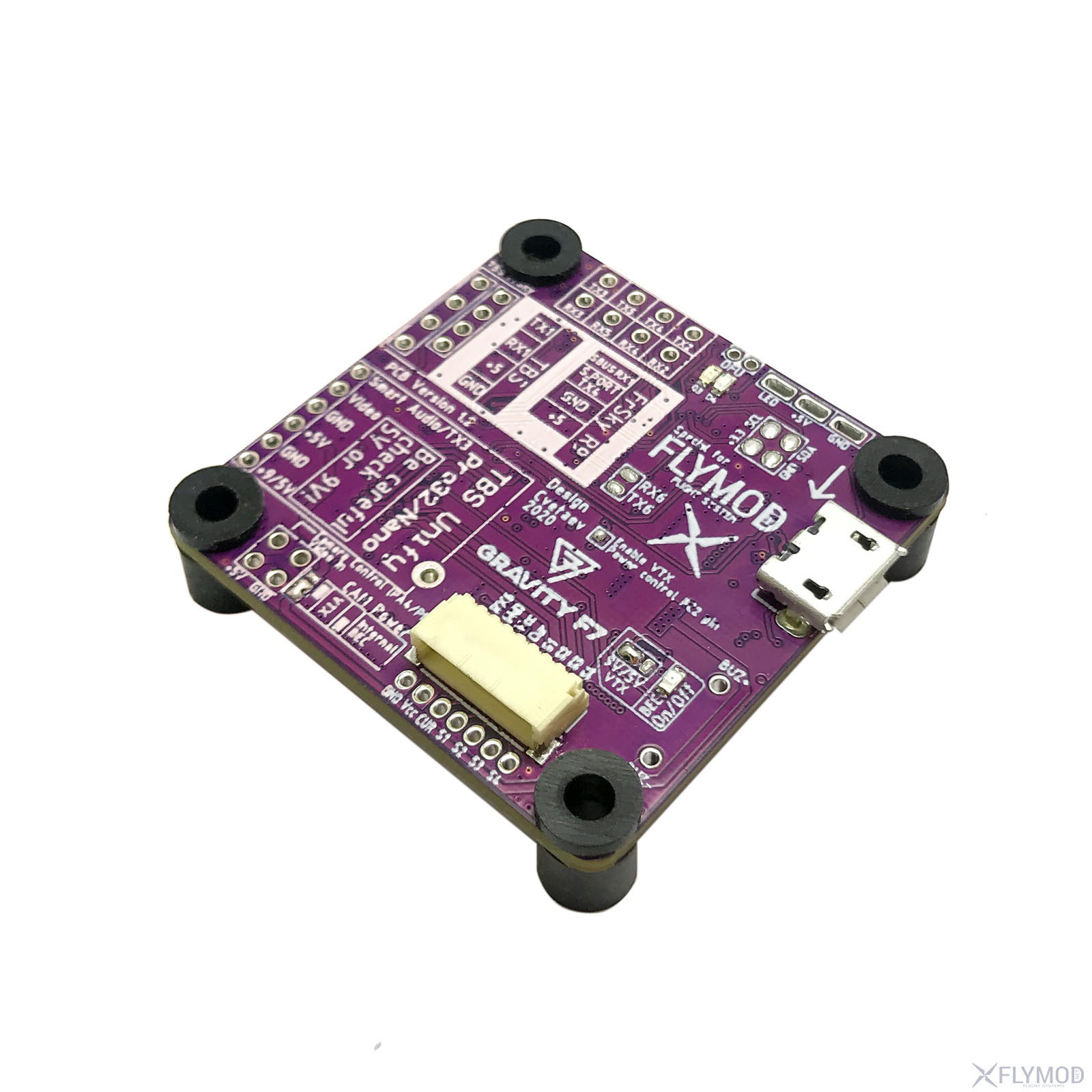
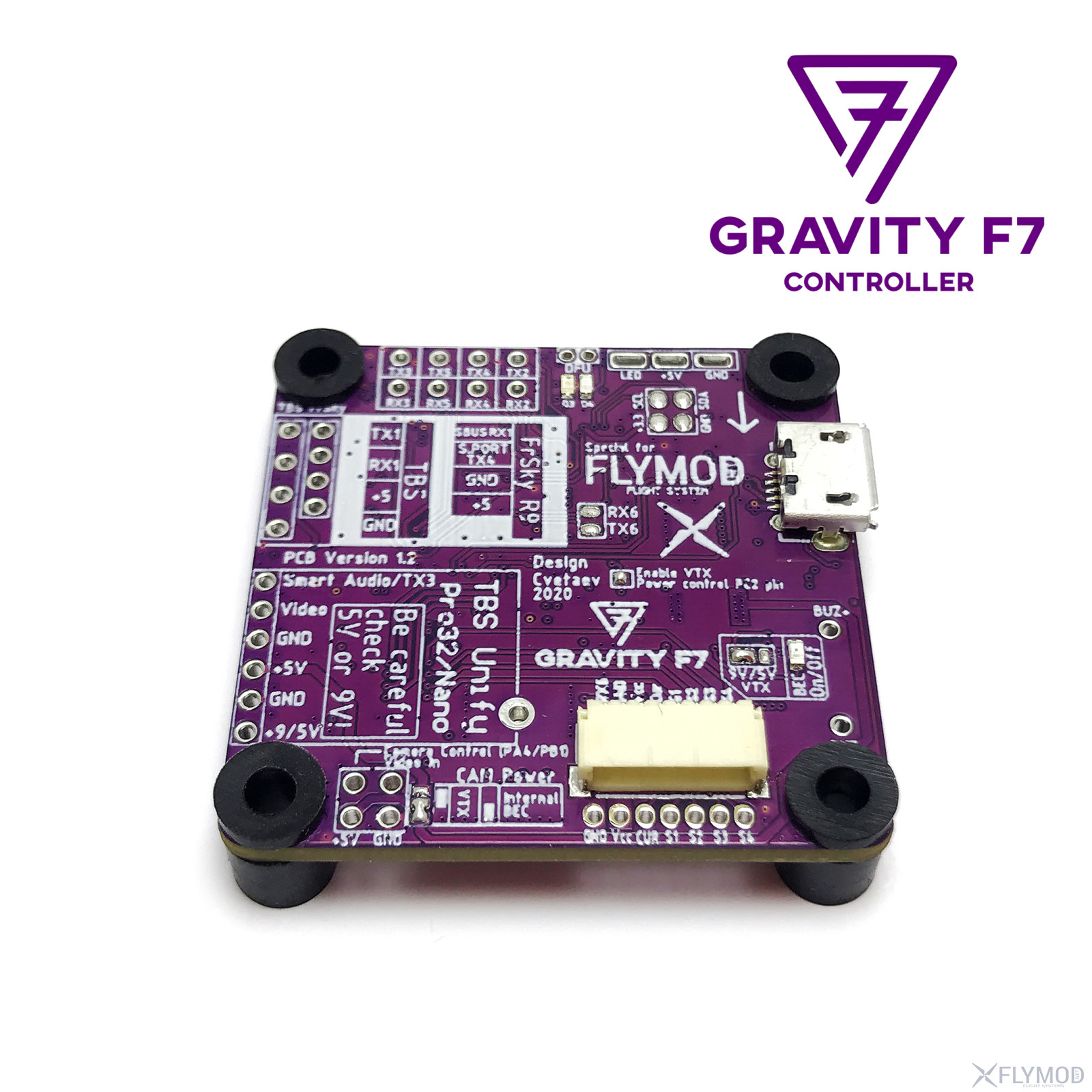
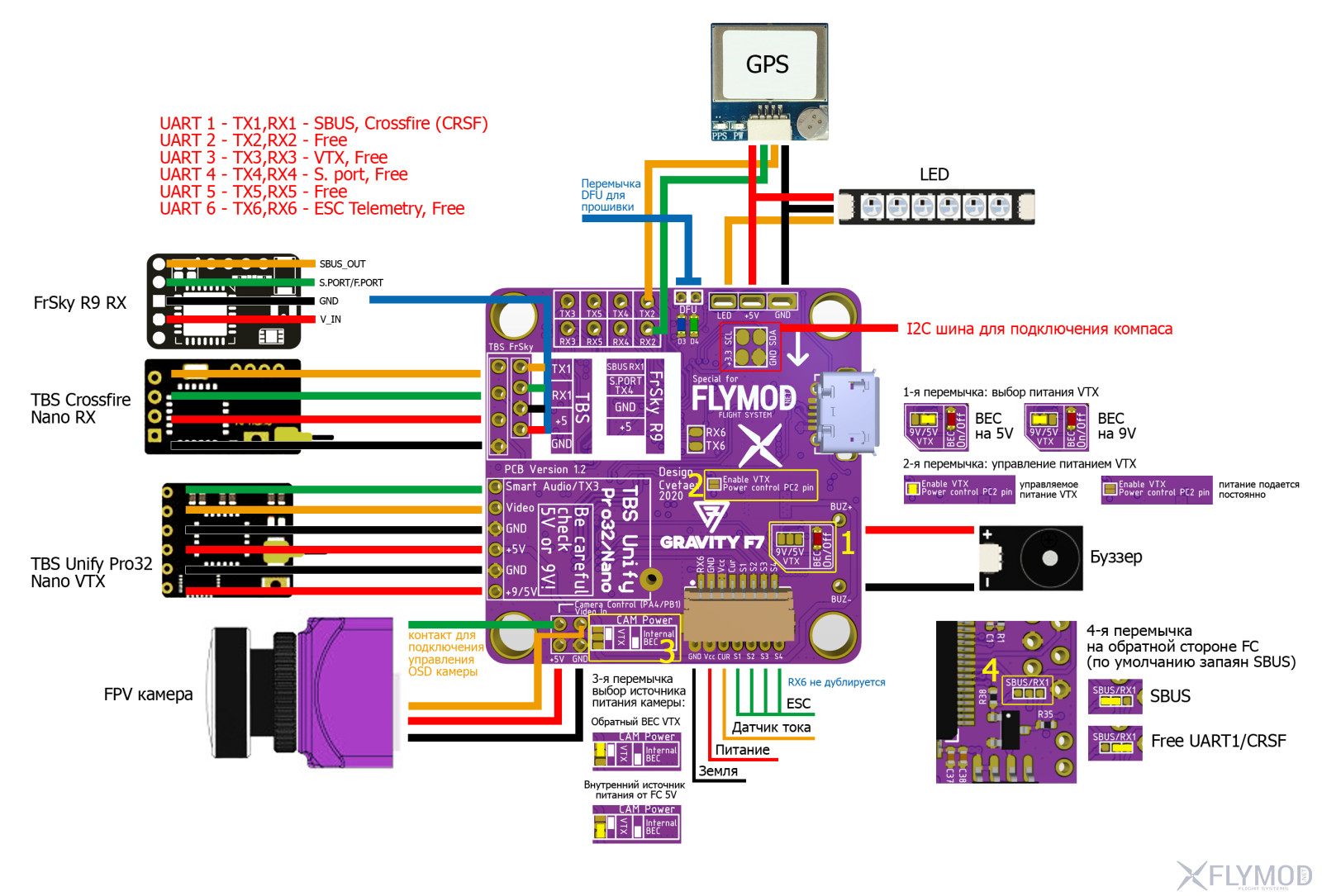
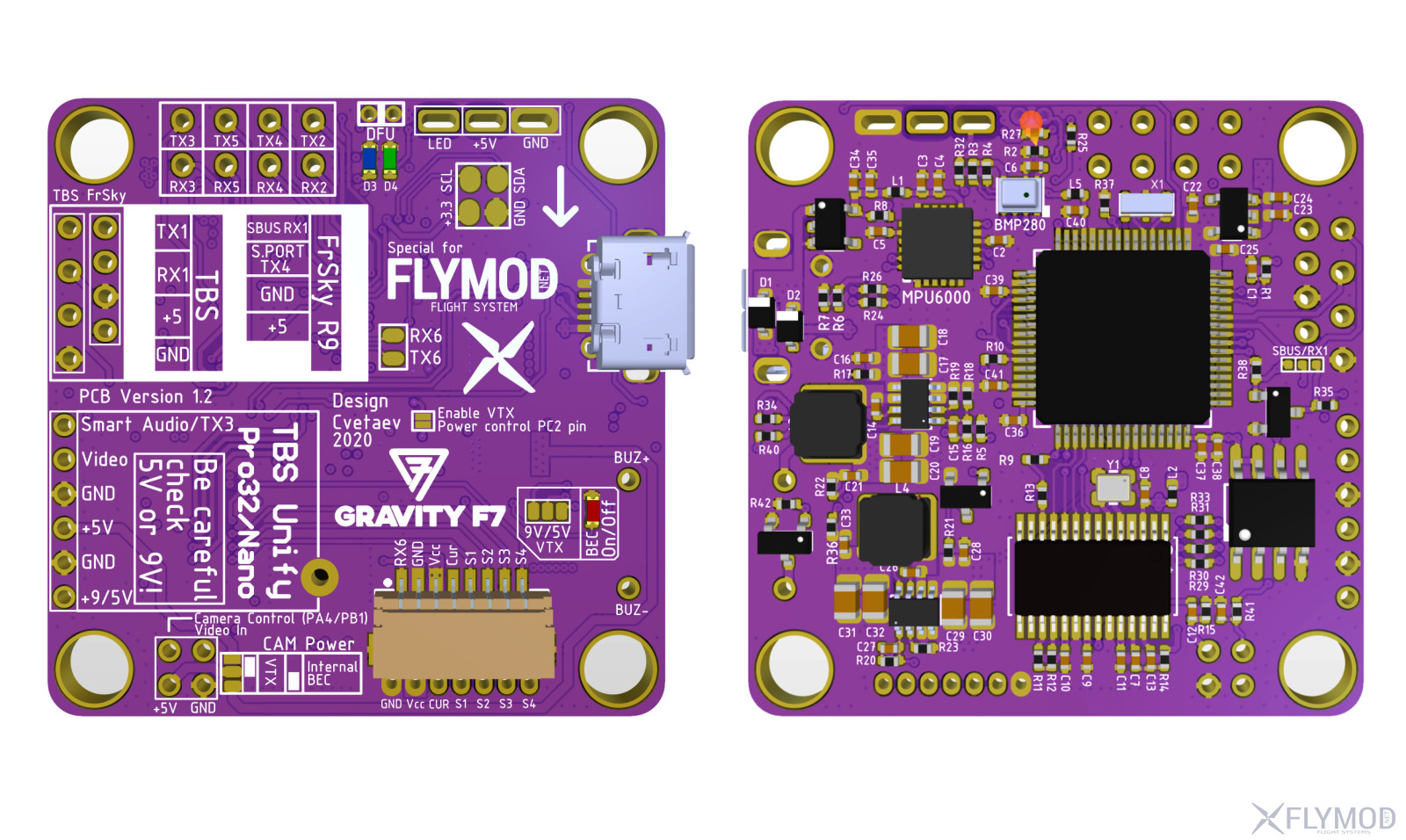
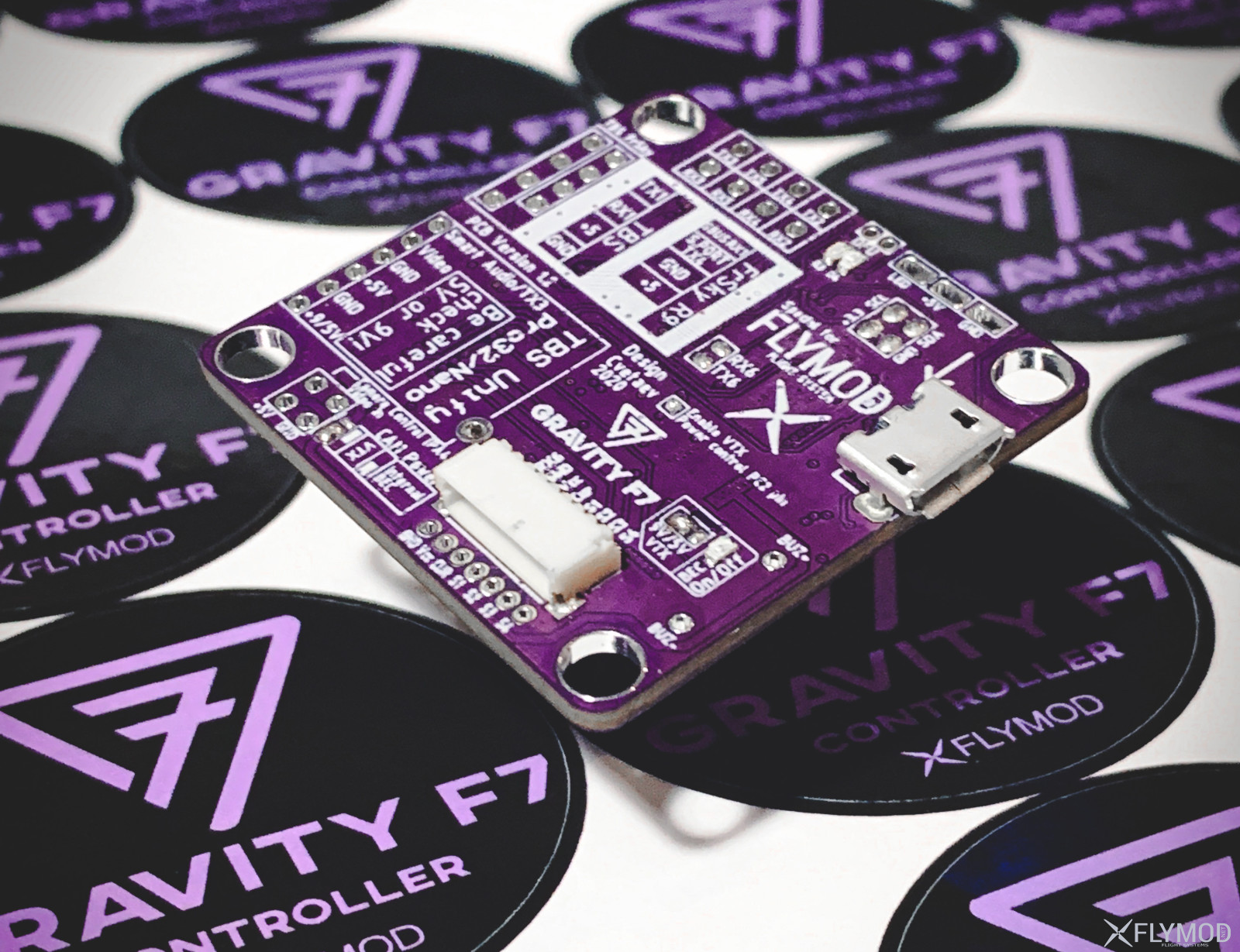
The jumper numbers correspond to the jumper number on the overall schematic:
1. Selects the voltage applied to the VTX. 5V or 9V from the internal BEC, 3A MAX. Next to the LED indicating the power supply to the VTX. The default jumper is 9V.
2. Enable VTX power management via Betaflight mode (USER1). If the jumper is not sealed, power is continuously supplied. By default, control via Betaflight is enabled.
3. Selects the camera power source, via the video transmitter's reverse BEC or the flight controller's internal 5V source. By default, a jumper is soldered to use the internal 5V BEC
4. Enable hardware inverter for SBUS or select pure UART to use TX1, RX1. By default, a jumper is soldered in to use the SBUS receivers. To install a Crossfire (CRSF) receiver on UART 1, you need to solder the second option, the regular TX1, RX1 as shown in the schematic.
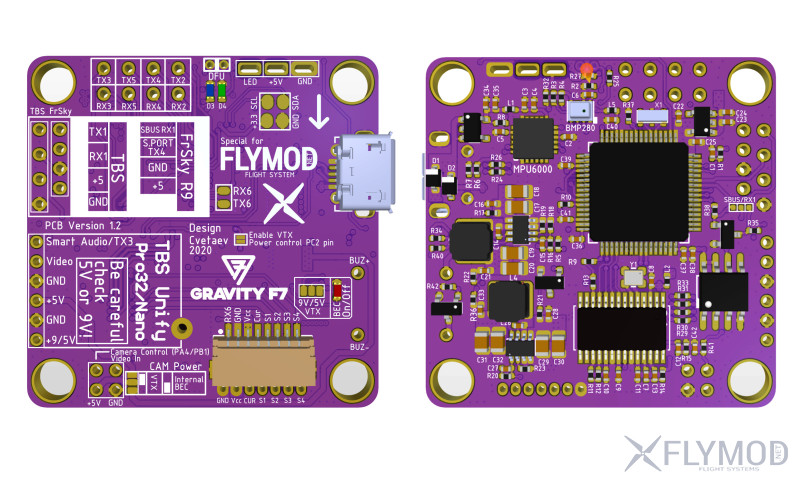
For flashing it is necessary to put the flight controller into DFU mode, for this purpose it is necessary to close DFU pins with tweezers or other metal jumper when powering the controller via USB. At the moment the device is flashed with Betaflight, EmuFlight firmware in the standard way by selecting the GRAVITYF7 target set. For INAV by downloading the firmware through the website and uploading it through firmware file selection, adding it to the general INAV release list while testing the firmware.
When setting up the PC for the first time it is necessary to load fonts for OSD. The download must be done with the battery connected to the flight controllers, as the OSD chip is not powered via USB only. Download information on GitHub.
UART 1 - SBUS, Crossfire (CRSF)
UART 2 - Free
UART 3 - VTX, Free
UART 4 - S. port, Free
UART 5 - Free
UART 6 - ESC Teletmetry, Free
Flight controller development: Cvetaev



Reviews and discussions
Был спор о возможных аппаратных проблемах с полетником Гравити, на 6s сетапах и т.д. Мало инфы в общем и просили фидбек. Вот мой опыт.
Я как кисовод (уже третий год), презренно отношусь к бетафлаю, потому как там не super simple. В кисе полтора фильтра и поехали. И было реально интересно летит ли оно? Смогу ли я осилить настройку беты? + Я лояльно отношусь к новому если оно работает. Это сподвигло отвлечься на время от съёмок и собрать гоночный квад!))
Из нюансов хотел бы отметить очень мелкие перемычки, если жало типа лопата - челенж. В целом мануал информативен и все паяется изи за 10 мин. Настройка беты - одна бессонная ночь в изучении материалов профессора Джошуа. И о чудо - оно летит . Да ещё как... Отличить от киса можно с трудом, разница 7-10% от суммарных ощущений. Никаких осцилляций, и тд.
В рейс сетапах использую обычно Кисс v1, достать его становится все сложней и сложней. Рассматривал альтернативы в виде феттека, но это чудо горит как спички... Соответственно теперь я думаю все полетники на гоночных сетапах перевести на бету.
Если интересно, регуль - новый tmotor 4in1 45a.
Собственно чего трепаться, вот мои потуги типа по воротам полетать )
https://imgur.com/a/Q0RHYyy
https://www.youtube.com/watch?v=7haKlCIJQGc
И второй вопрос так и не смог настроить телеметрию с приемником XSR через S.Port.
В остальном - норм полётник, удобно р9мм туда становится. Летаю редко на нём (ждал 2.6), но пока полётник не подводил.
Значения датчика тока зависят уже от самого датчика тока на регуляторах скорости (ESC) или на плате разводки питания, смотря где он установлен, могут быть разные, обычно по умолчанию оставляют, калибруют, или берут у производителей регуляторов рекомендуемые.
Registration