- Моя корзина
- Цены в: USD
Показать цены в:
- Курс $: 45.4грн
- UA RU EN
Забыли пароль?
Авторизация с помощьюGoogle





Авторизация с помощьюGoogle
Показать цены в:


Бонусы будут начислены на этот товар при покупке
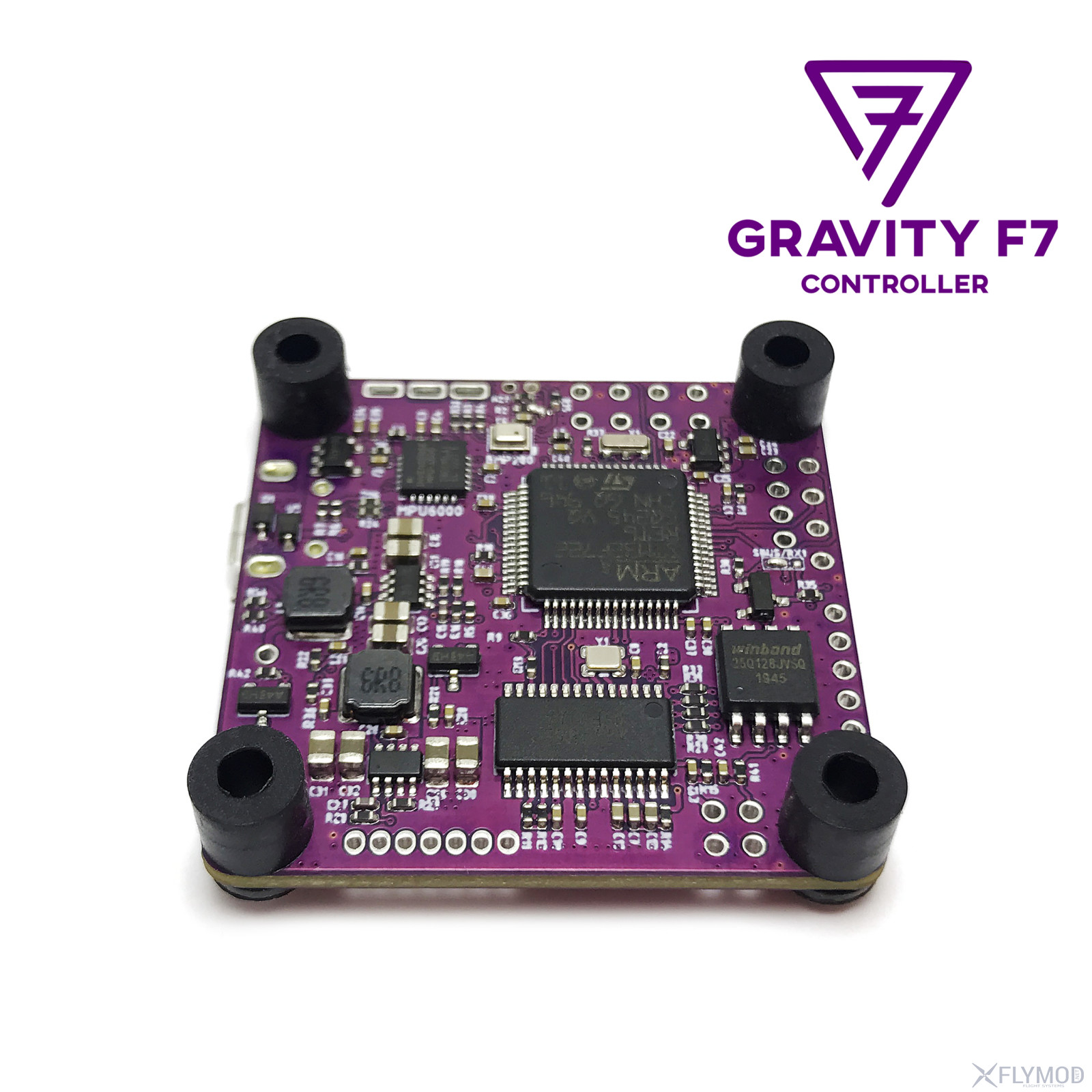
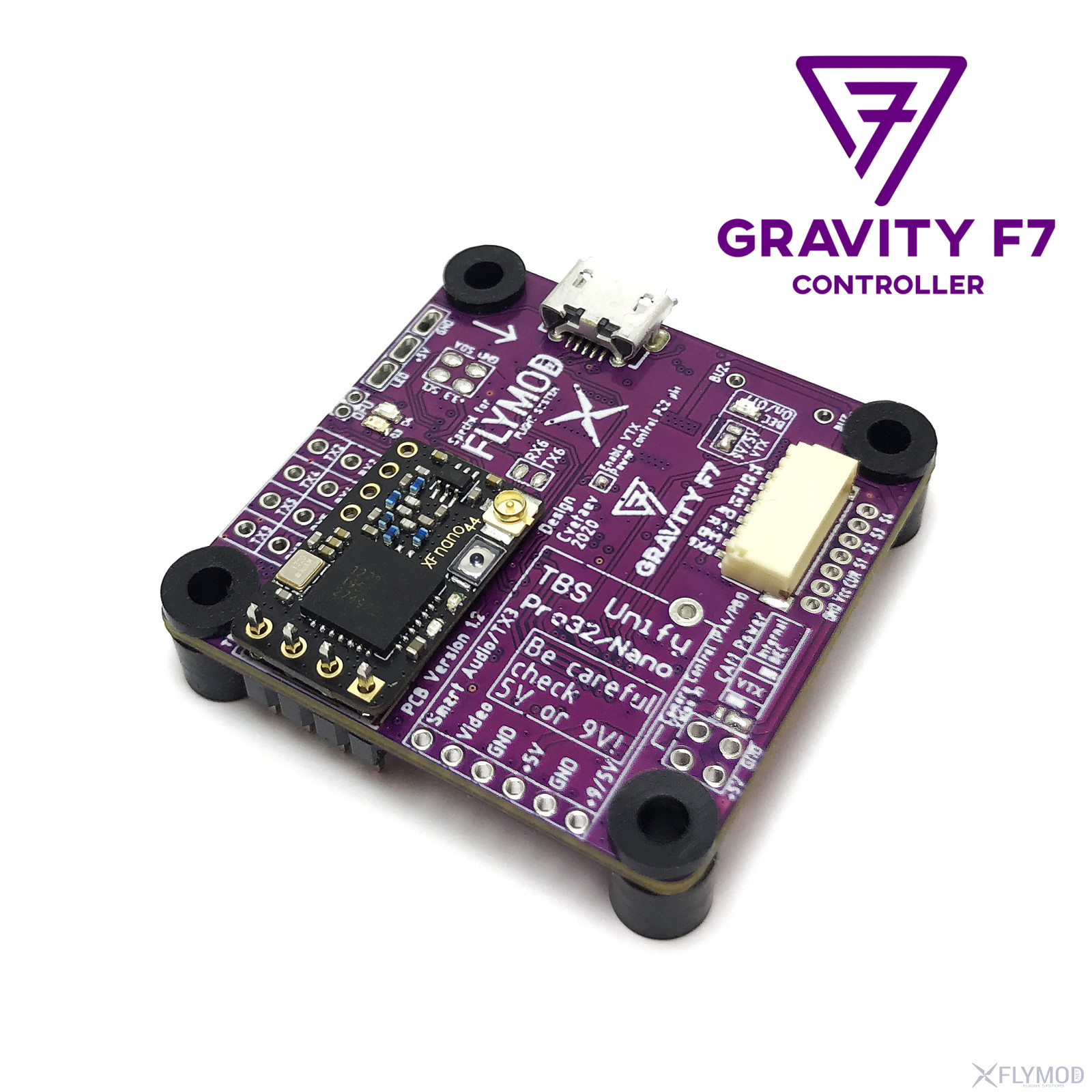
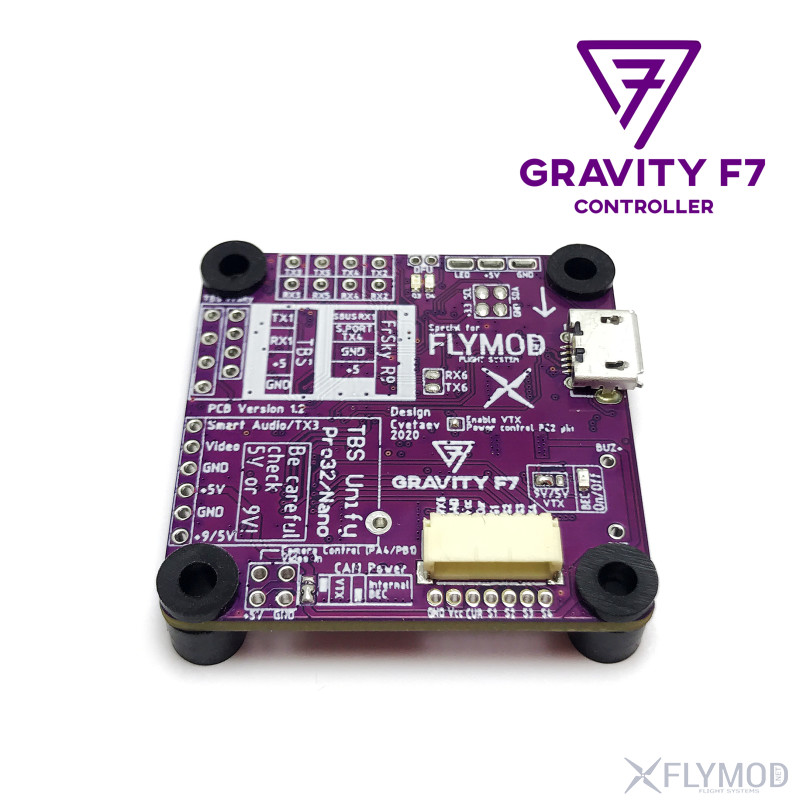
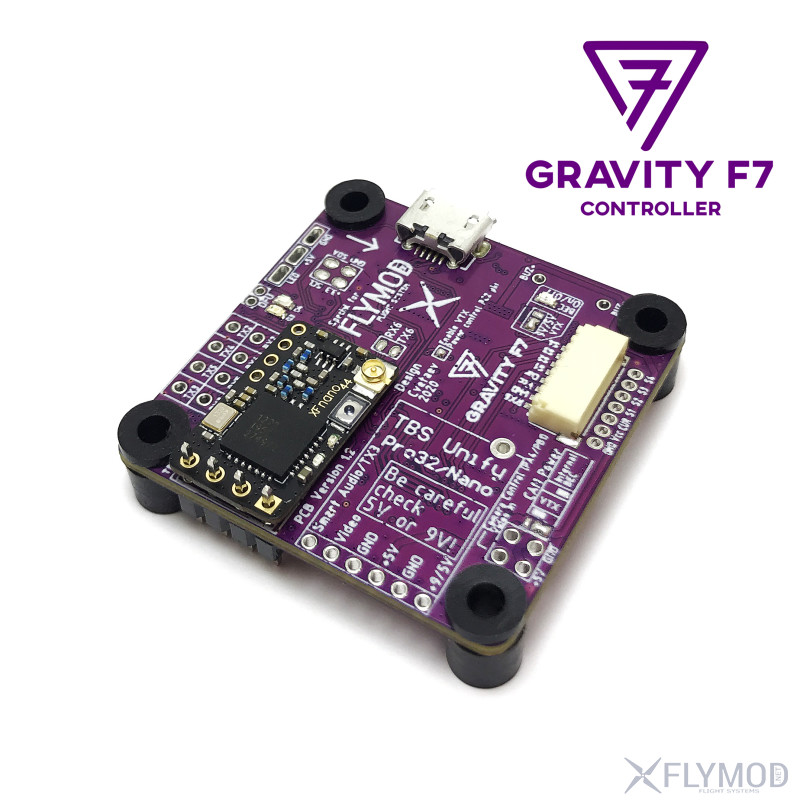
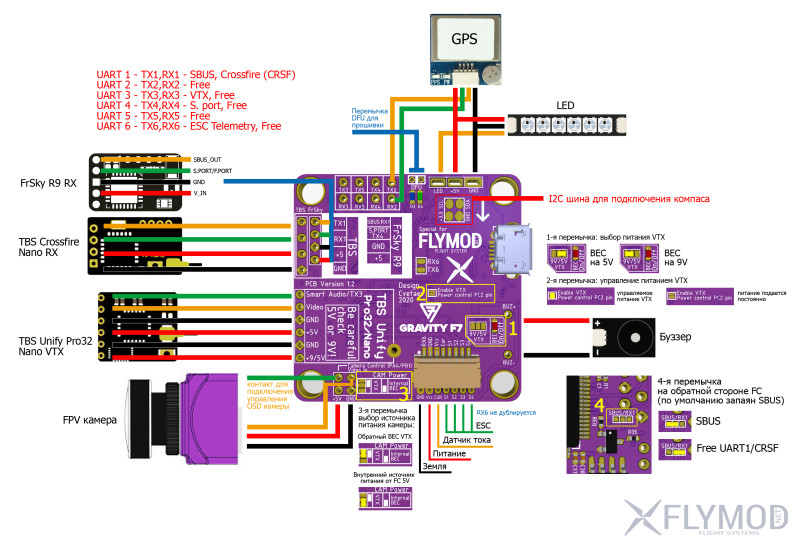
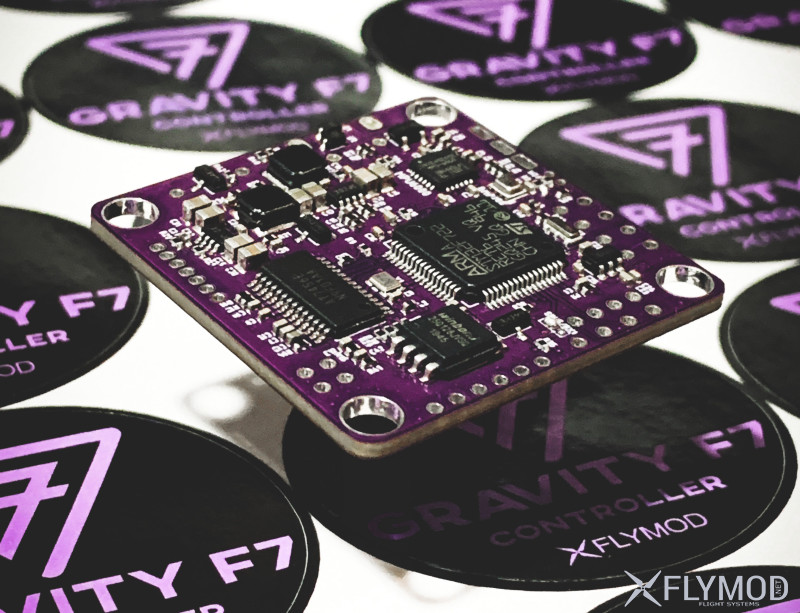
ПодробнееКонтроллер полета Flymod Gravity F7, разработан в Украине для потребностей украинских FPV пилотов. Контроллер идеально совместим с видео передатчиками и приемниками от TBS, что позволяет выполнить чистый и красивый монтаж. Предназначен для гоночных FPV квадрокоптеров и других подобных дронов.
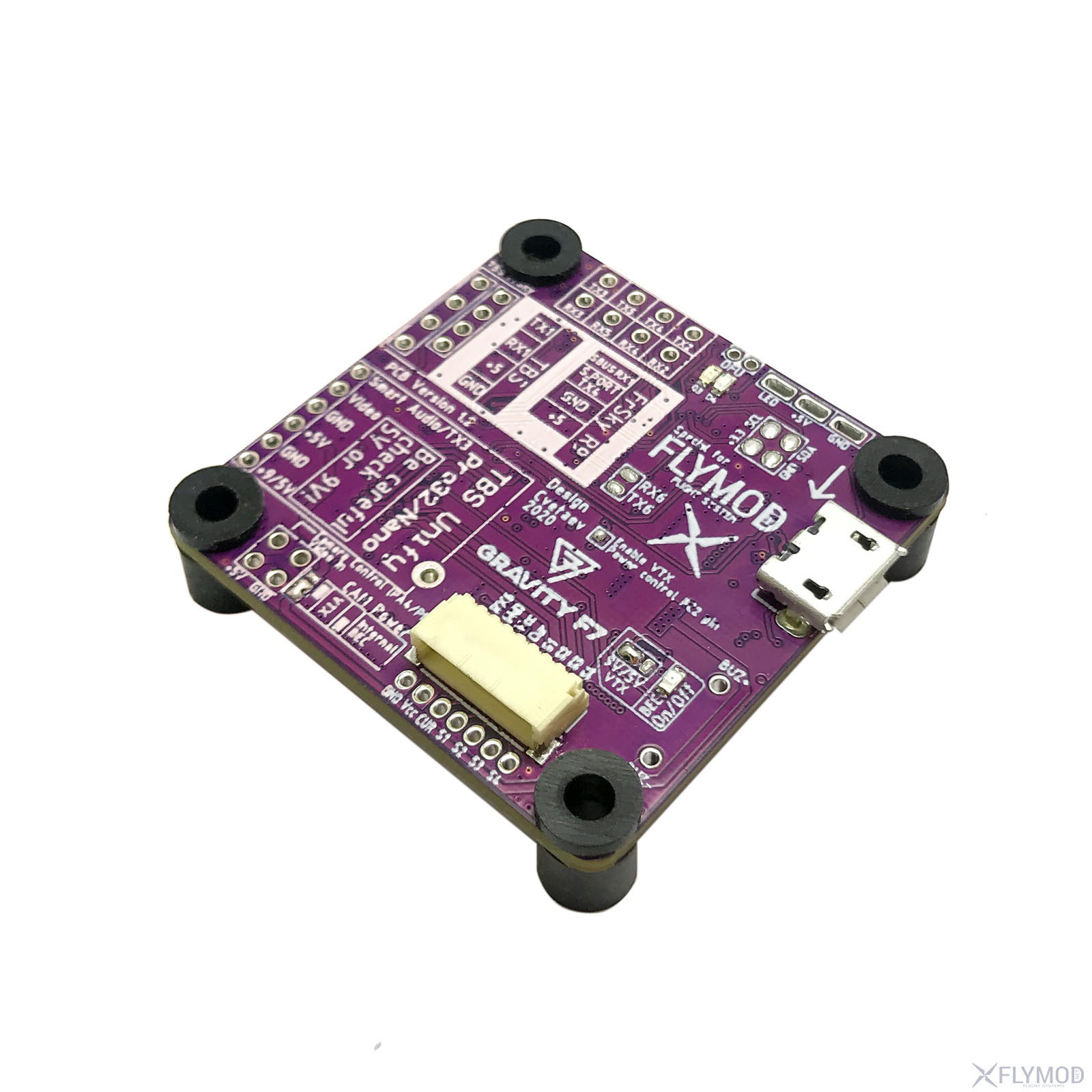
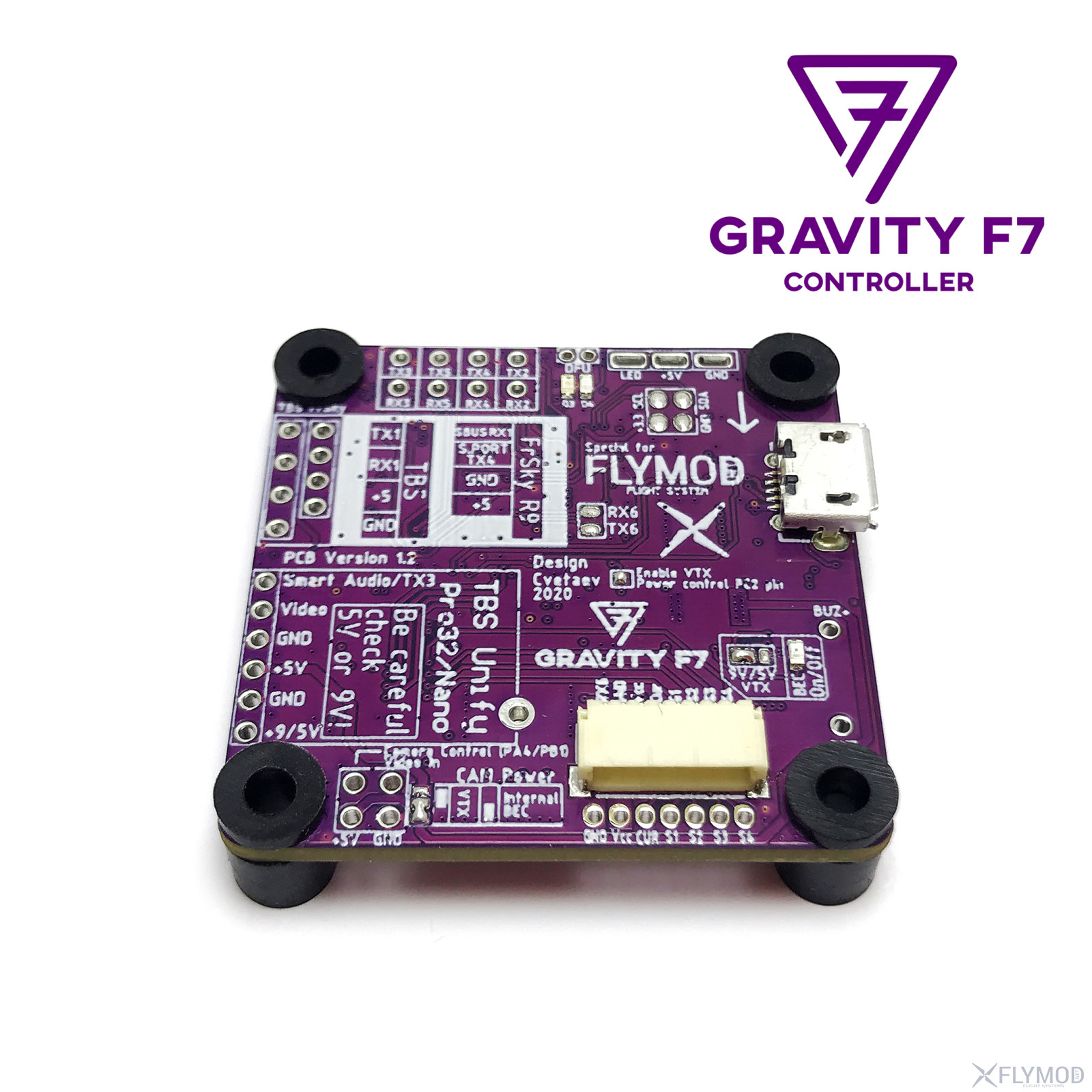
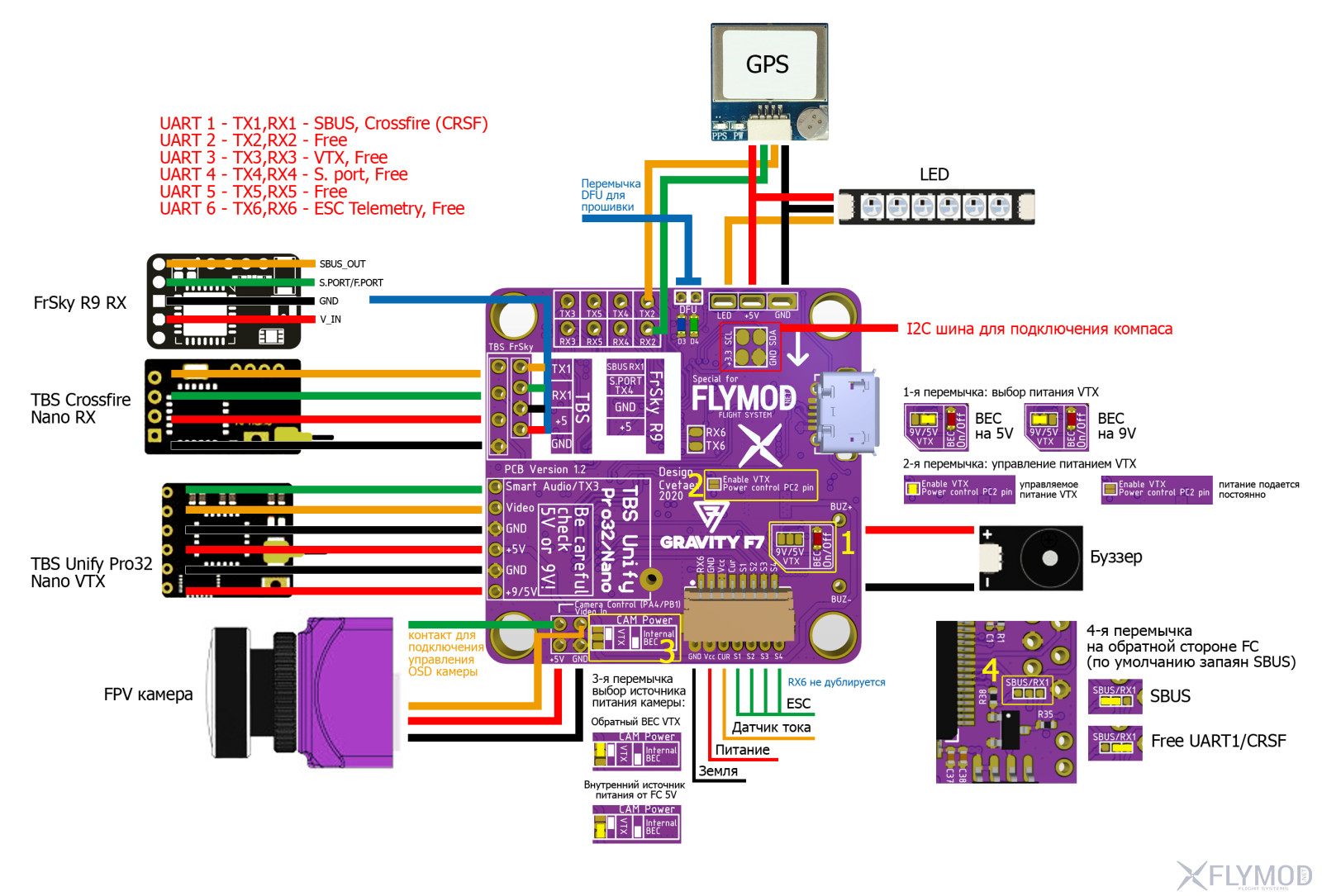
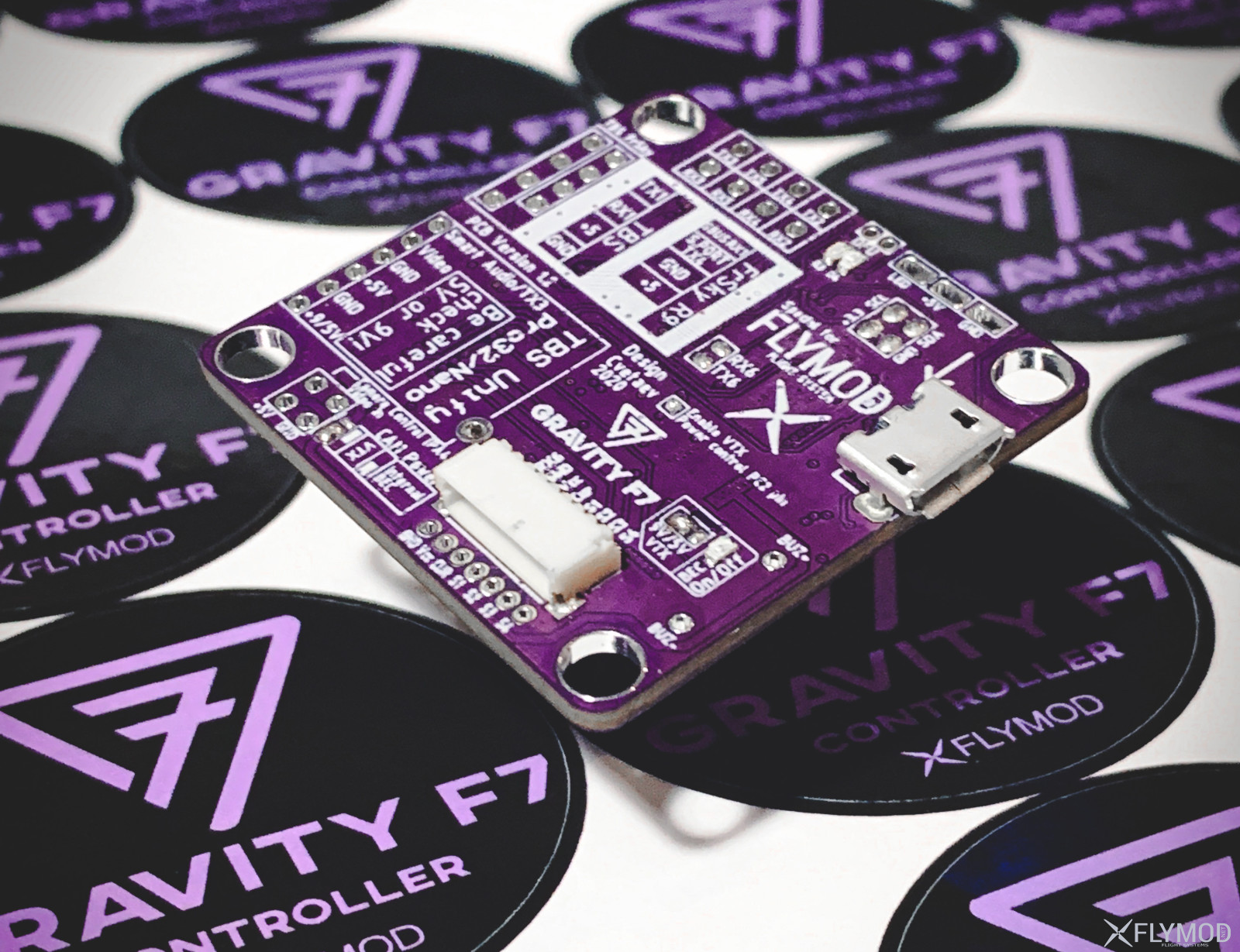
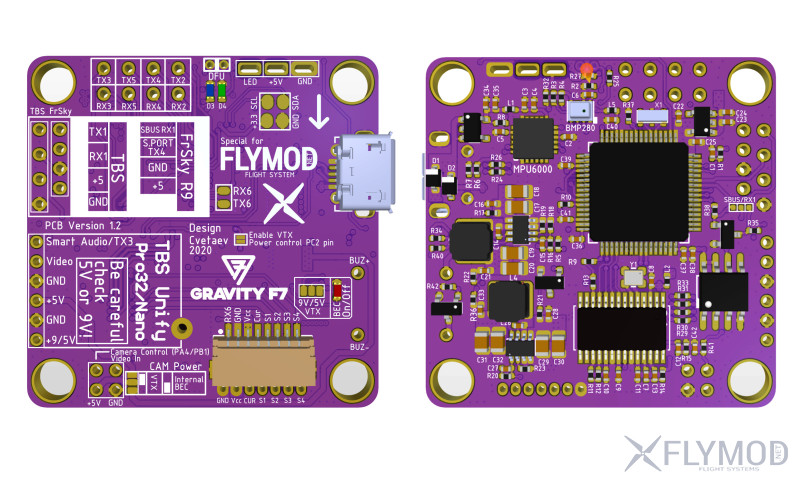
Номера перемычек соответствуют номеру перемычки на общей схеме:
1. Выбор напряжения подаваемого на VTX. 5В или 9В от внутреннего BEC, 3A MAX. Рядом светодиодный индикатор, отображающий подачу питания на VTX. По умолчанию перемычка на 9В.
2. Включить управление питанием VTX через режим Betaflight (USER1). Если перемычка не запаяна, питание подается постоянно. По умолчанию включено управление через Betaflight.
3. Выбор источника питания камеры, через обратный BEC видео-передатчика или внутренний источник полетного контроллера 5В. По умолчанию запаяна перемычка для использования внутреннего 5V BEC
4. Включение аппаратного инвертора для SBUS или выбор чистого UART для использования TX1, RX1. По умолчанию запаяна перемычка для подключения приемников SBUS. Для установки приемника Crossfire (CRSF) на UART 1, нужно запаять вторую опцию - обычный TX1, RX1 как показано на схеме.
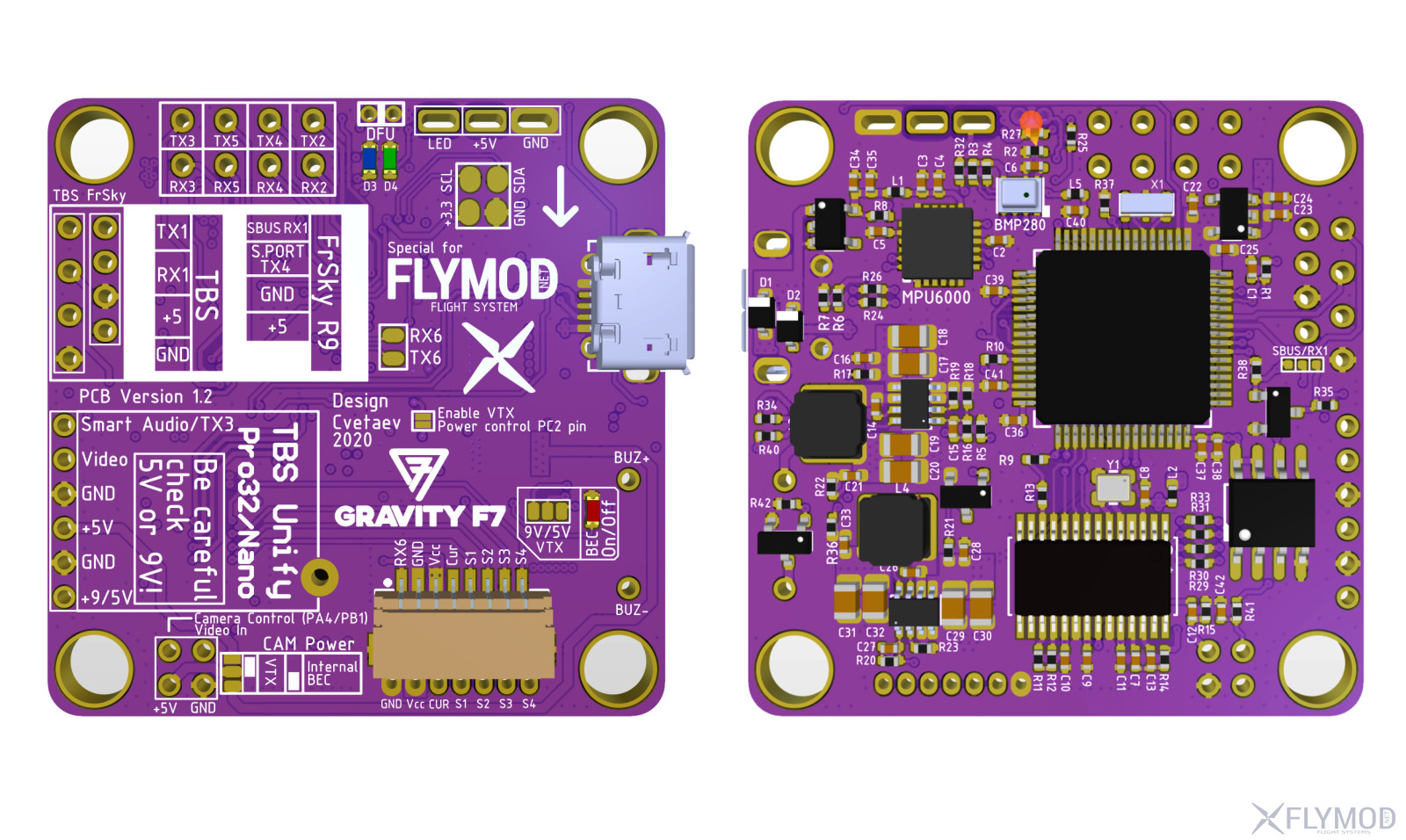
Для прошивки необходимо перевести полетный контроллер в режим DFU, для этого нужно замкнуть контакты DFU пинцетом или другой металлической перемычкой при подаче питания на контроллер через USB. На данный момент устройство прошивается прошивками Betaflight, EmuFlight стандартным способом при выборе таргета GRAVITYF7. Для INAV путем скачивания прошивки через сайт и загрузки ее через выбор файла прошивки, добавление в общий релизный список INAV в процессе тестирования прошивки.
При первой настройке ПК необходимо загрузить шрифты для OSD. Загрузку при этом нужно производить при подключённой батареи на полетный контроллеры, так как подача питания на микросхему OSD только через USB не происходит. Информация по загрузке на GitHub.
UART 1 - SBUS, Crossfire (CRSF)
UART 2 - Free
UART 3 - VTX, Free
UART 4 - S. port, Free
UART 5 - Free
UART 6 - ESC Teletmetry, Free
Разработка полетного контроллера: Cvetaev





Отзывы и обсуждения
Был спор о возможных аппаратных проблемах с полетником Гравити, на 6s сетапах и т.д. Мало инфы в общем и просили фидбек. Вот мой опыт.
Я как кисовод (уже третий год), презренно отношусь к бетафлаю, потому как там не super simple. В кисе полтора фильтра и поехали. И было реально интересно летит ли оно? Смогу ли я осилить настройку беты? + Я лояльно отношусь к новому если оно работает. Это сподвигло отвлечься на время от съёмок и собрать гоночный квад!))
Из нюансов хотел бы отметить очень мелкие перемычки, если жало типа лопата - челенж. В целом мануал информативен и все паяется изи за 10 мин. Настройка беты - одна бессонная ночь в изучении материалов профессора Джошуа. И о чудо - оно летит . Да ещё как... Отличить от киса можно с трудом, разница 7-10% от суммарных ощущений. Никаких осцилляций, и тд.
В рейс сетапах использую обычно Кисс v1, достать его становится все сложней и сложней. Рассматривал альтернативы в виде феттека, но это чудо горит как спички... Соответственно теперь я думаю все полетники на гоночных сетапах перевести на бету.
Если интересно, регуль - новый tmotor 4in1 45a.
Собственно чего трепаться, вот мои потуги типа по воротам полетать )
https://imgur.com/a/Q0RHYyy
https://www.youtube.com/watch?v=7haKlCIJQGc
И второй вопрос так и не смог настроить телеметрию с приемником XSR через S.Port.
В остальном - норм полётник, удобно р9мм туда становится. Летаю редко на нём (ждал 2.6), но пока полётник не подводил.
Значения датчика тока зависят уже от самого датчика тока на регуляторах скорости (ESC) или на плате разводки питания, смотря где он установлен, могут быть разные, обычно по умолчанию оставляют, калибруют, или берут у производителей регуляторов рекомендуемые.
Регистрация