- Мій кошик
- Ціни в: USD
Показати ціни в:
- Курс $: 45.4грн
- UA RU EN
Забули свій пароль?
Авторизація за допомогоюGoogle





Авторизація за допомогоюGoogle
Показати ціни в:


Бонуси будуть зачислені на цей товар при покупці
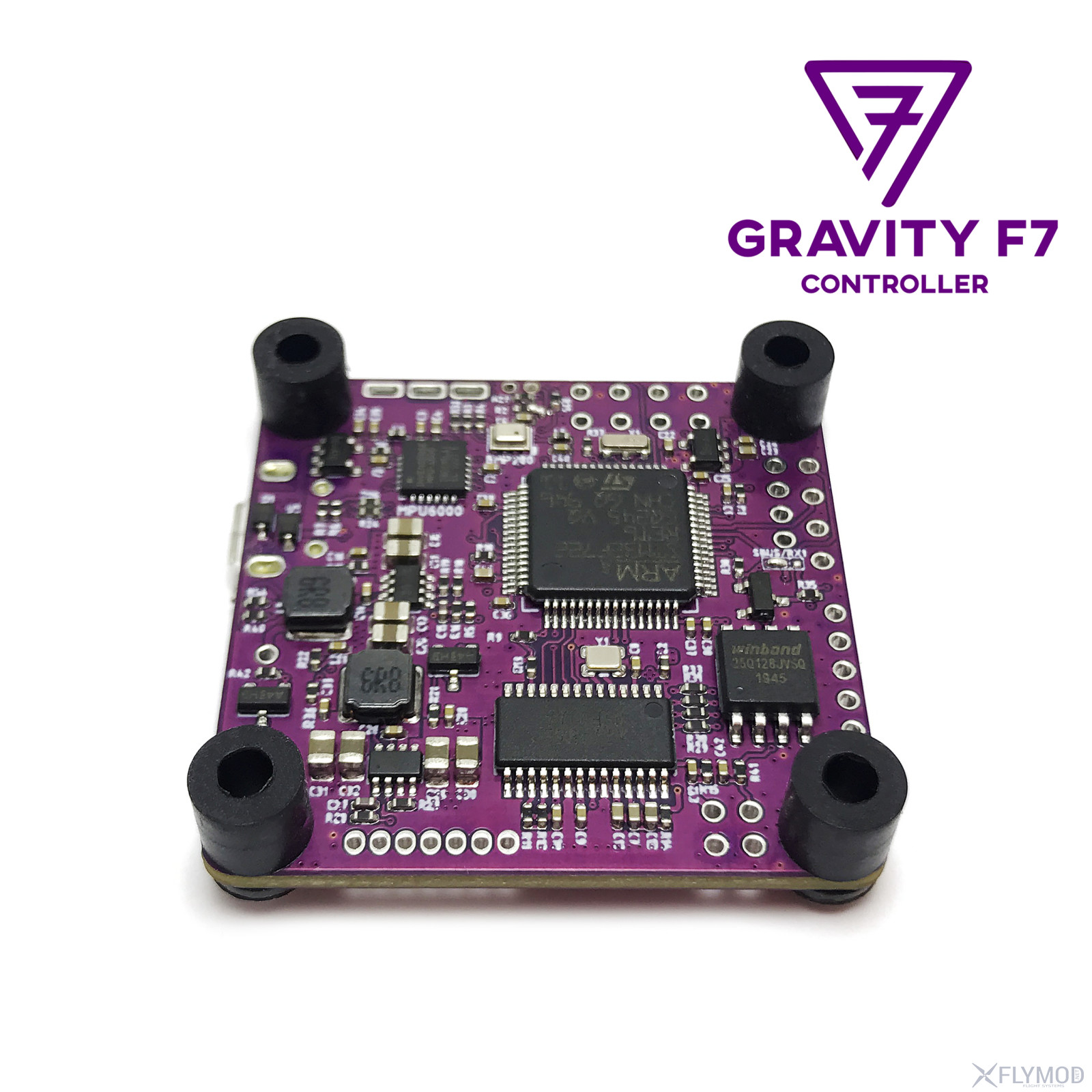
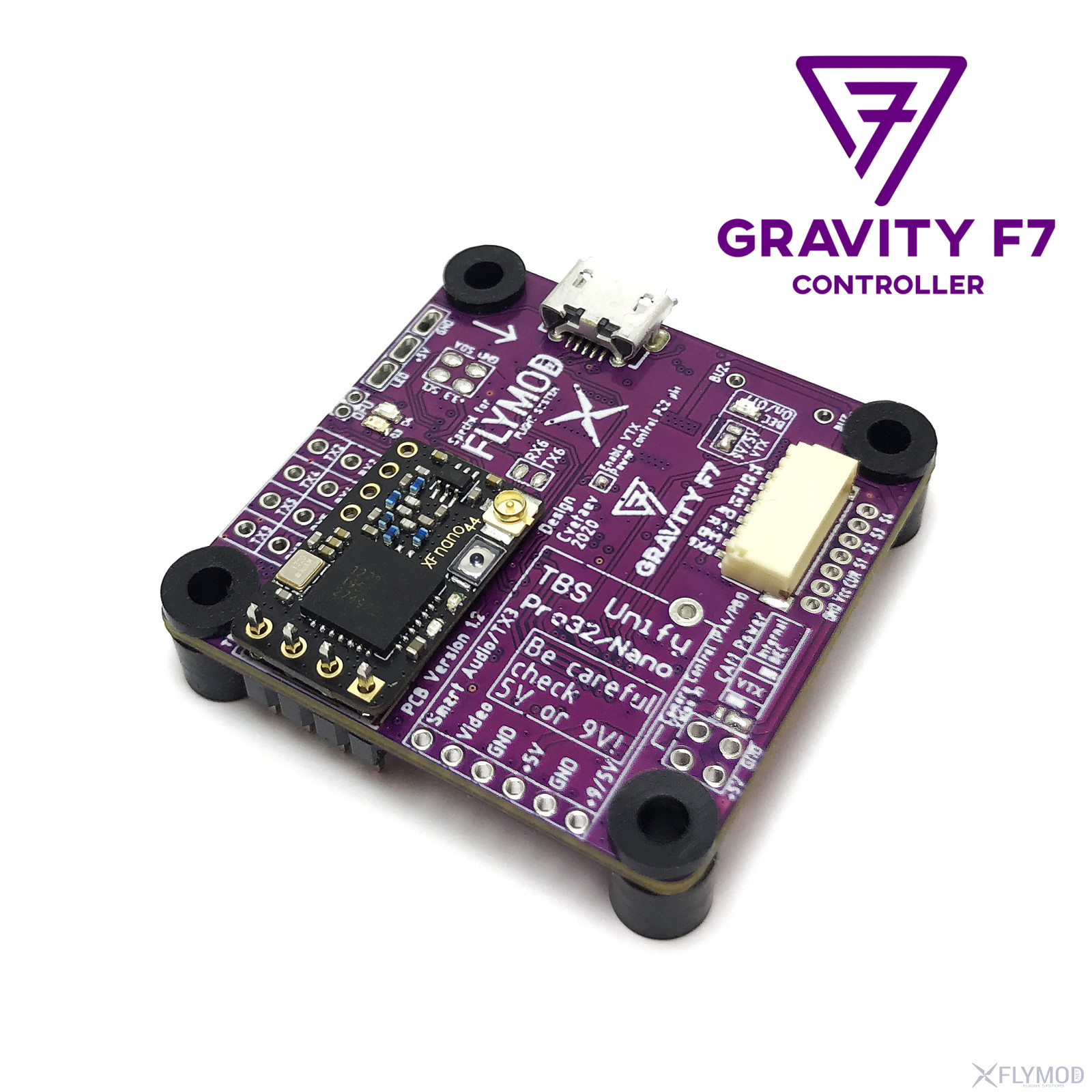
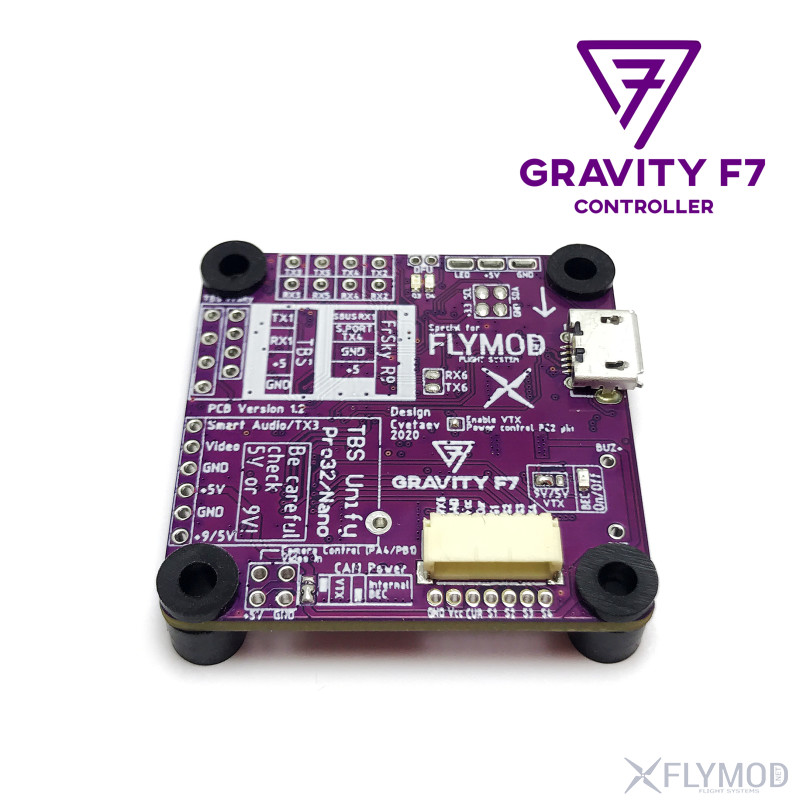
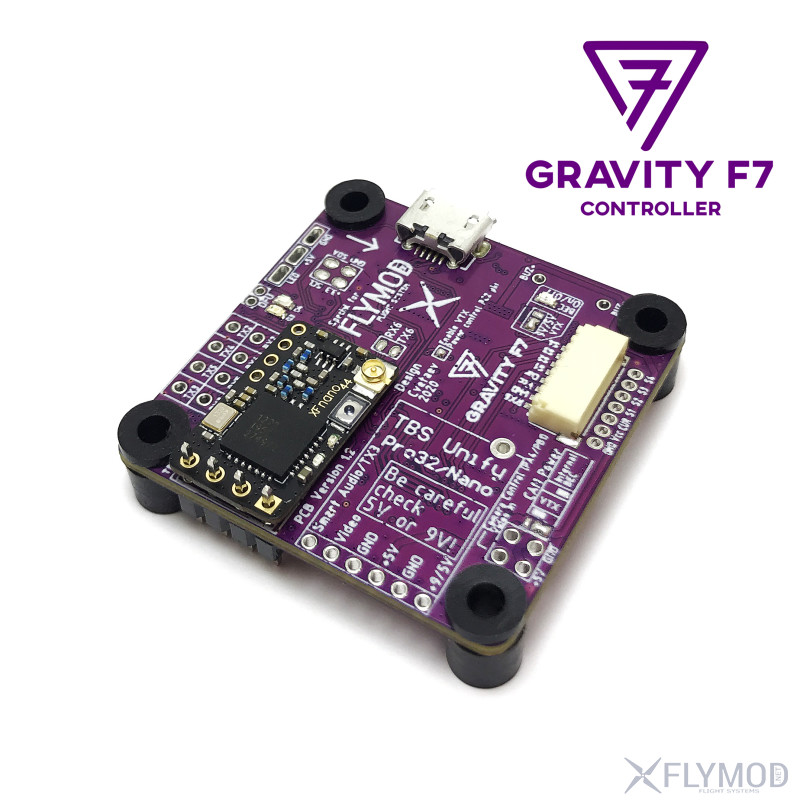
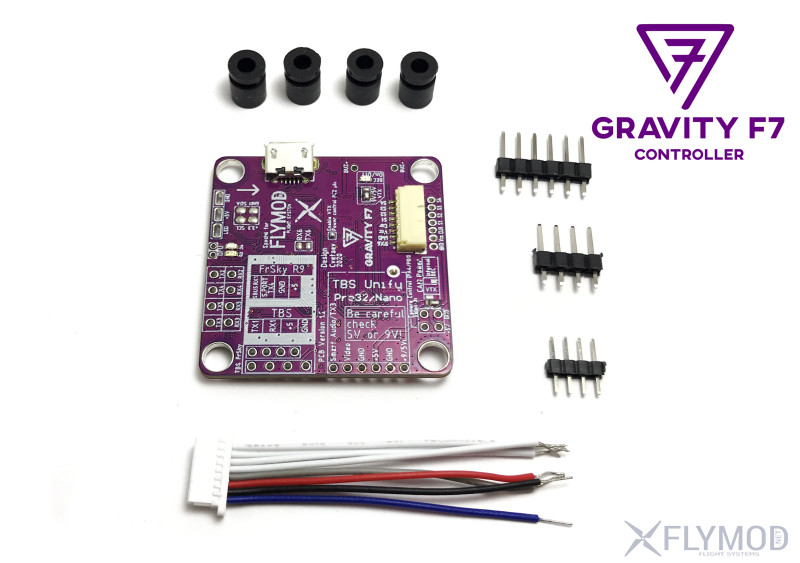
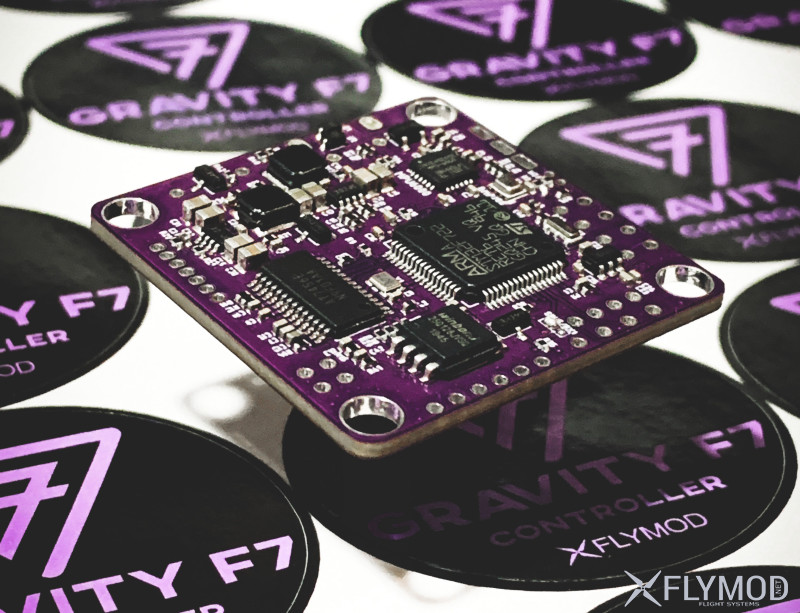
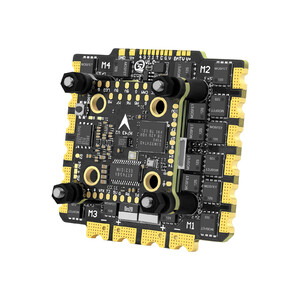
ДетальнішеКонтролер польоту Flymod Gravity F7, розроблений в Україні для потреб українських FPV пілотів. Контролер ідеально сумісний з відео передавачами і приймачами від TBS, що дає змогу виконати чистий і красивий монтаж. Призначений для гоночних FPV квадрокоптерів та інших подібних дронів.
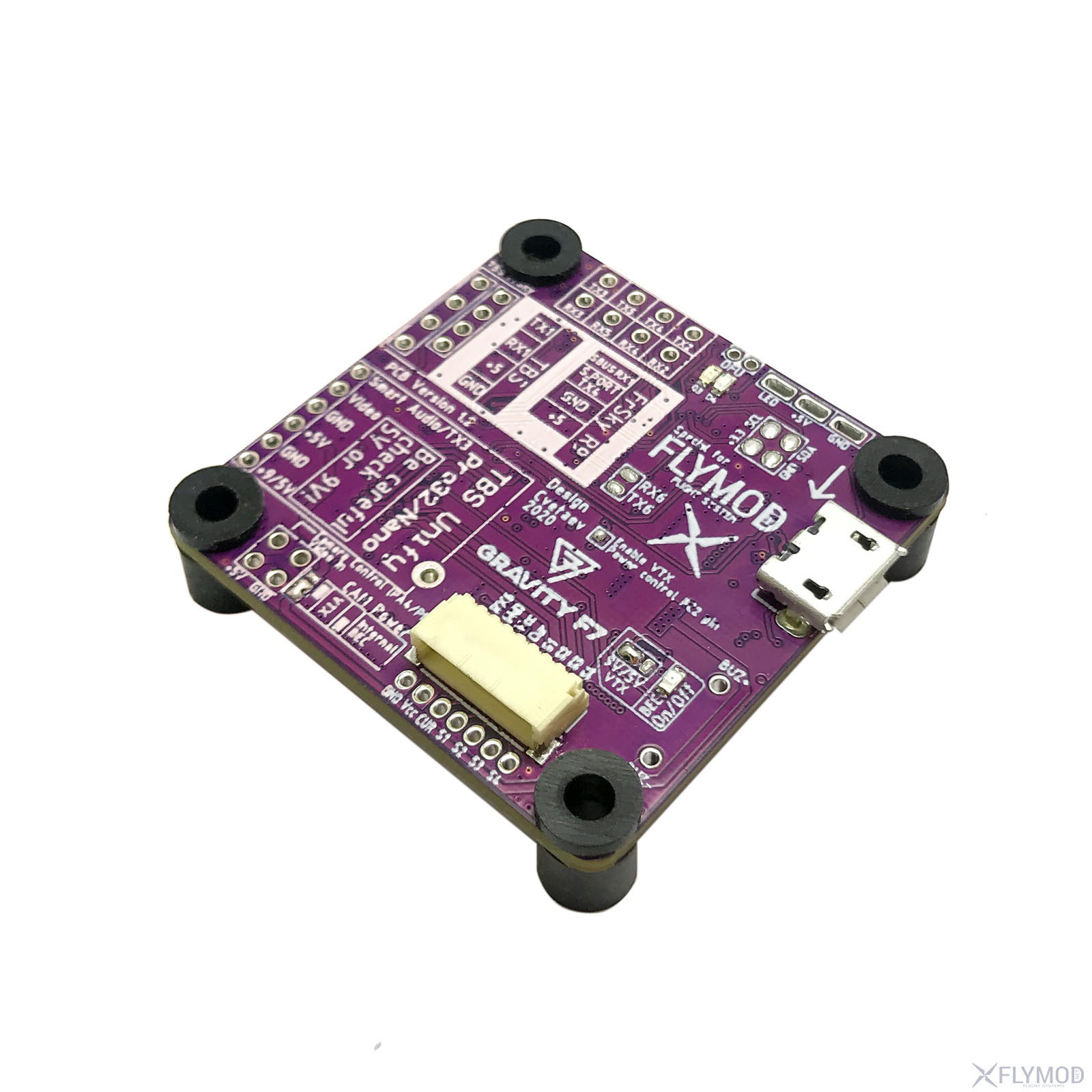
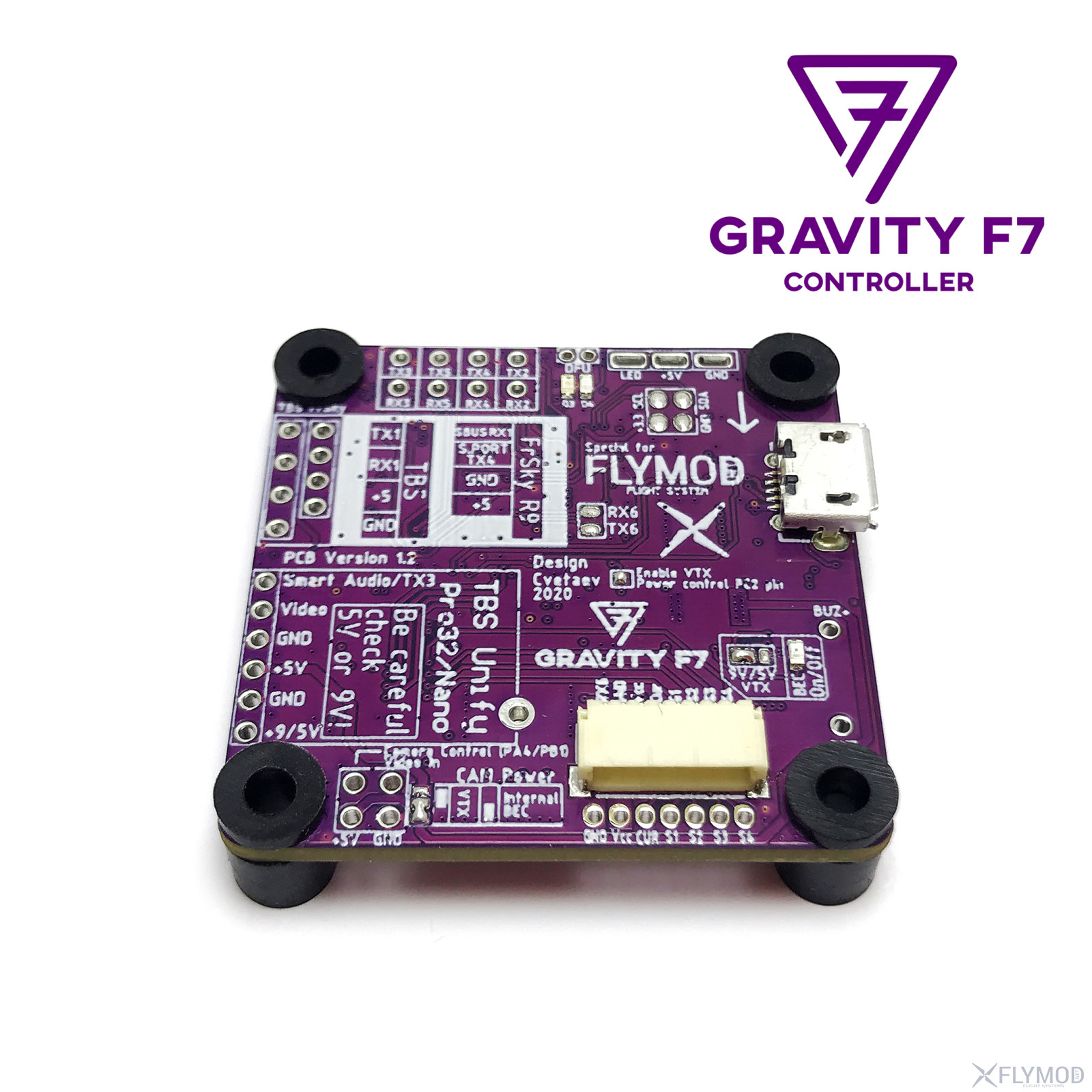
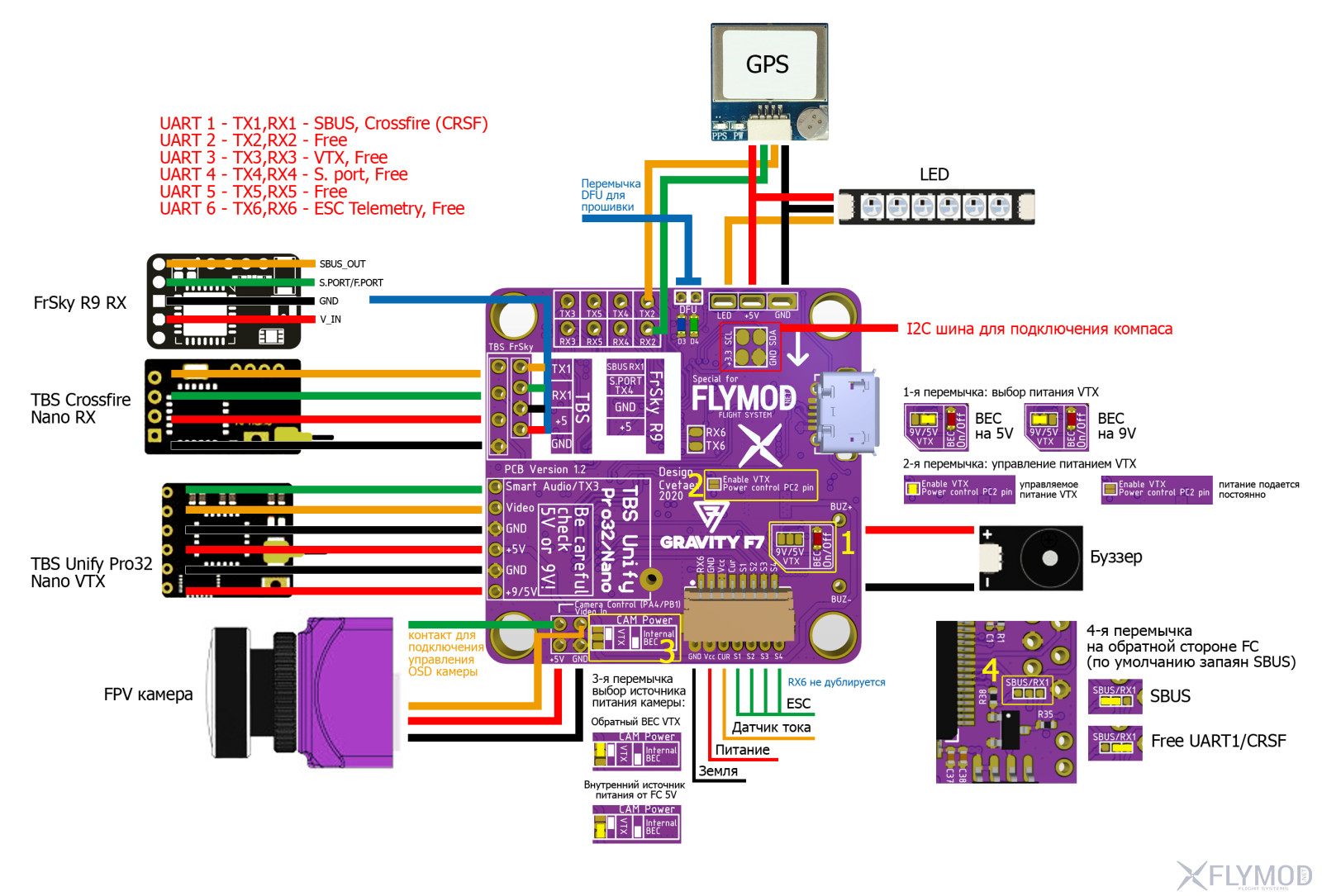
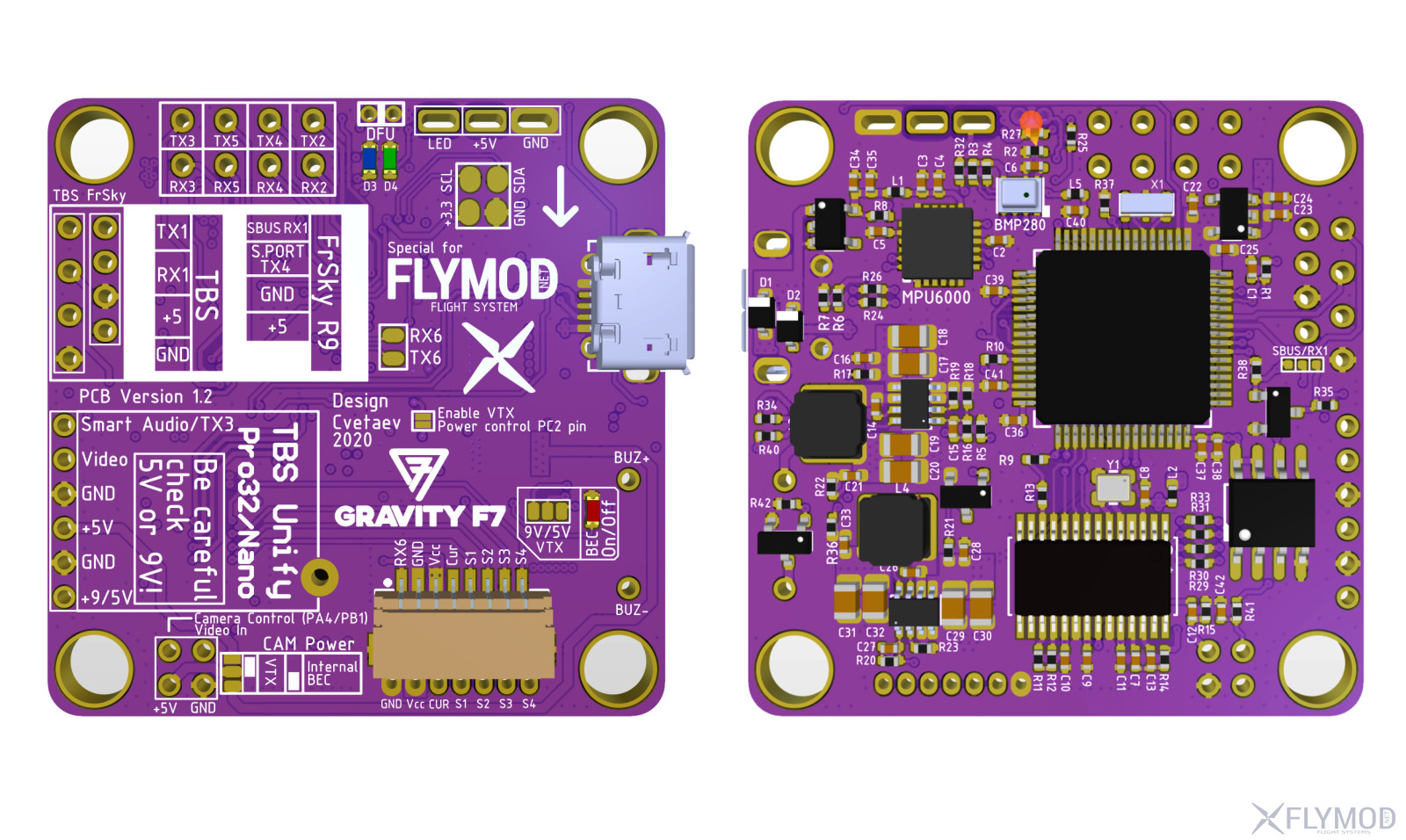
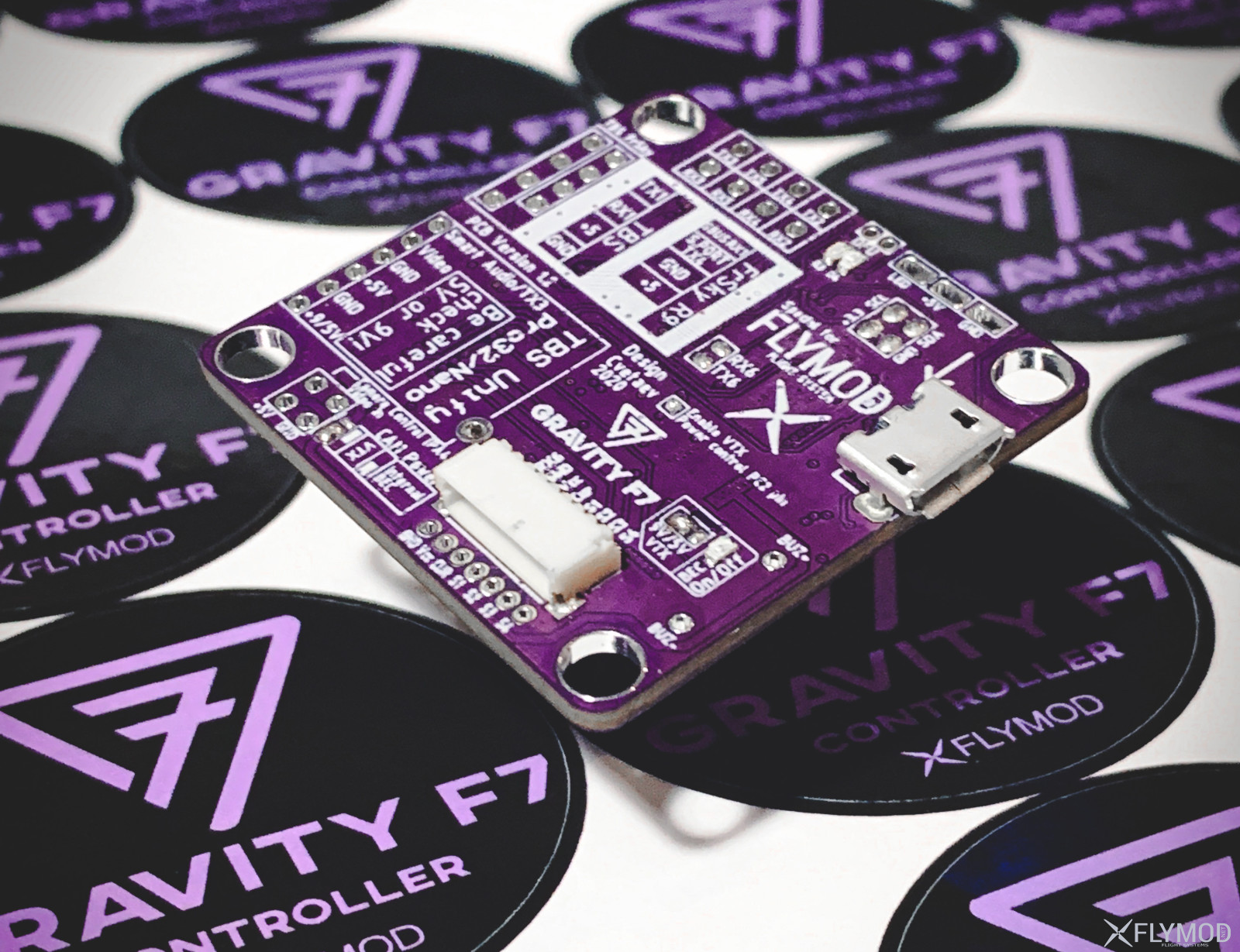
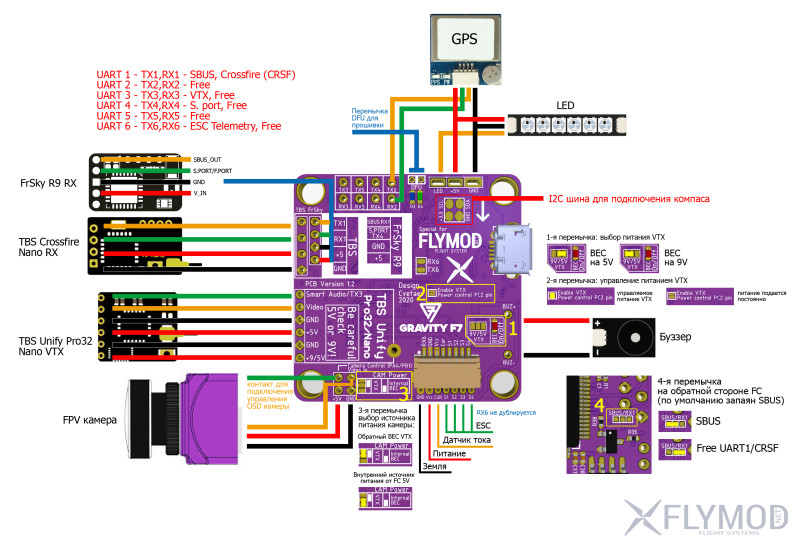
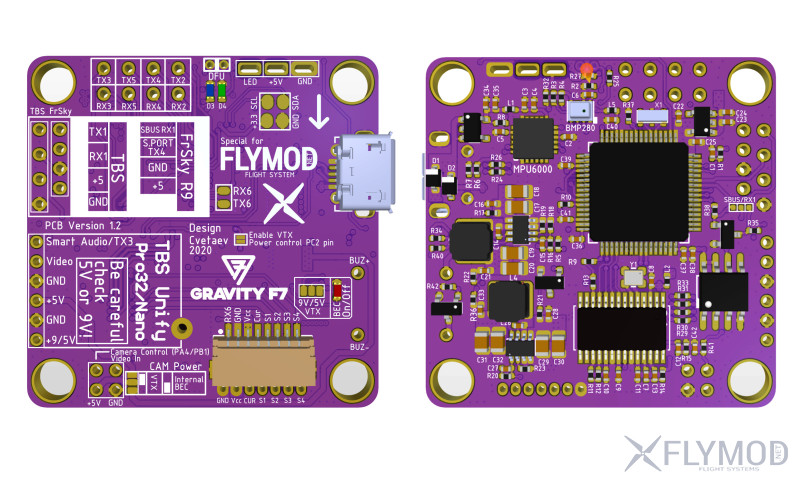
Номери перемичок відповідають номеру перемички на загальній схемі:
1. Вибір напруги, що подається на VTX. 5В або 9В від внутрішнього BEC, 3A MAX. Поруч світлодіодний індикатор, що відображає подачу живлення на VTX. За замовчуванням перемичка на 9В.
2. Увімкнути керування живленням VTX через режим Betaflight (USER1). Якщо перемичка не запаяна, живлення подається постійно. За замовчуванням увімкнено керування через Betaflight.
3. Вибір джерела живлення камери, через зворотний BEC відео-передавача або внутрішнє джерело польотного контролера 5В. За замовчуванням запаяна перемичка для використання внутрішнього 5V BEC
4. Увімкнення апаратного інвертора для SBUS або вибір чистого UART для використання TX1, RX1. За замовчуванням запаяна перемичка для підключення приймачів SBUS. Для встановлення приймача Crossfire (CRSF) на UART 1, потрібно запаяти другу опцію - звичайний TX1, RX1 як показано на схемі.
Для прошивки необхідно перевести польотний контролер у режим DFU, для цього потрібно замкнути контакти DFU пінцетом або іншою металевою перемичкою під час подачі живлення на контролер через USB. Наразі пристрій прошивається прошивками Betaflight, EmuFlight стандартним способом під час вибору таргета GRAVITYF7. Для INAV шляхом скачування прошивки через сайт і завантаження її через вибір файлу прошивки, додавання до загального релізного списку INAV у процесі тестування прошивки.
Під час першого налаштування ПК необхідно завантажити шрифти для OSD. Завантаження при цьому потрібно проводити при підключеній батареї на польотний контролери, оскільки подача живлення на мікросхему OSD тільки через USB не відбувається. Інформація щодо завантаження на GitHub.
UART 1 - SBUS, Crossfire (CRSF)
UART 2 - Free
UART 3 - VTX, Free
UART 4 - S. port, Free
UART 5 - Free
UART 6 - ESC Teletmetry, Free
Розробка польотного контролера: Cvetaev



Огляди та обговорення
Был спор о возможных аппаратных проблемах с полетником Гравити, на 6s сетапах и т.д. Мало инфы в общем и просили фидбек. Вот мой опыт.
Я как кисовод (уже третий год), презренно отношусь к бетафлаю, потому как там не super simple. В кисе полтора фильтра и поехали. И было реально интересно летит ли оно? Смогу ли я осилить настройку беты? + Я лояльно отношусь к новому если оно работает. Это сподвигло отвлечься на время от съёмок и собрать гоночный квад!))
Из нюансов хотел бы отметить очень мелкие перемычки, если жало типа лопата - челенж. В целом мануал информативен и все паяется изи за 10 мин. Настройка беты - одна бессонная ночь в изучении материалов профессора Джошуа. И о чудо - оно летит . Да ещё как... Отличить от киса можно с трудом, разница 7-10% от суммарных ощущений. Никаких осцилляций, и тд.
В рейс сетапах использую обычно Кисс v1, достать его становится все сложней и сложней. Рассматривал альтернативы в виде феттека, но это чудо горит как спички... Соответственно теперь я думаю все полетники на гоночных сетапах перевести на бету.
Если интересно, регуль - новый tmotor 4in1 45a.
Собственно чего трепаться, вот мои потуги типа по воротам полетать )
https://imgur.com/a/Q0RHYyy
https://www.youtube.com/watch?v=7haKlCIJQGc
И второй вопрос так и не смог настроить телеметрию с приемником XSR через S.Port.
В остальном - норм полётник, удобно р9мм туда становится. Летаю редко на нём (ждал 2.6), но пока полётник не подводил.
Значения датчика тока зависят уже от самого датчика тока на регуляторах скорости (ESC) или на плате разводки питания, смотря где он установлен, могут быть разные, обычно по умолчанию оставляют, калибруют, или берут у производителей регуляторов рекомендуемые.
Реєстрація