ArduPilot Mega is a flight controller with a complete UAV (Unmanned Aerial Vehicle) solution. The controller, in addition to simple manual control, has an array of different flight modes, including automatic missions such as flying on a map or a predetermined route to set points. A round-trip telemetry transfer function will allow you to control the device throughout the flight via your smartphone, tablet or computer. And built-in brain logging, will allow you to record and view technical readings such as sensor readings, GPS and more.
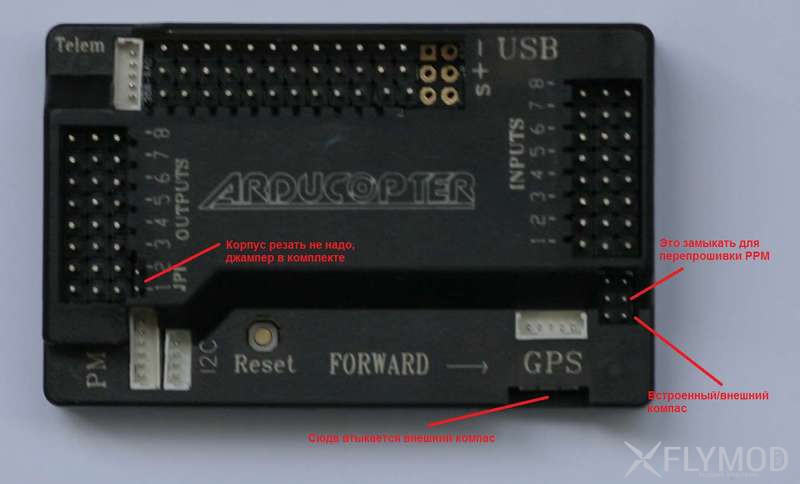
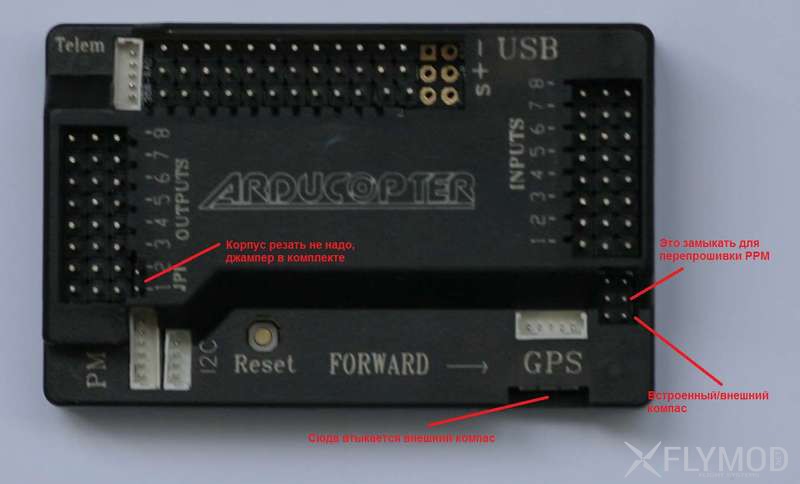
Note that APM version 2.8 has a slightly different layout than APM 2.6.
This version, unlike APM 2.6, has a built-in compass as well as some fixes to the built-in power regulator.
When connecting an external GPS with compass, it is necessary to disable the internal compass on the controller with the corresponding jumper.
Advantages
Low price compared to other flight controllers of this functionality
Full automatic pilot
Set up to 166 flight points on the map
On-the-fly flight path editing
Open source code and software
Support for various types of controlled vehicles: Tricopter, Quadcopter (X, +, H, V frames), Hexacopter, Octocopter, Y6, X8, traditional helicopters, airplanes, cars and boats
Features
3 axis gyroscope, accelerometer and high precision barometer
Stabilization system with aerial acrobatics capability
GPS position holding, point-to-point flight and return to start point
Ability to use infrared sensor for obstacle avoidance
Support for ultrasonic sensor (Sonar sensor) for automatic takeoff and landing
Automatic following of waypoints
PWM motor control using low-cost ESCs
Proprietary stabilization system for camera (suspension controller function)
Radio communication and telemetry from on-board
Support for multiple frames and configurations of flying and riding vehicles
Support for battery level sensor
Customizable flight light indication
Compatible with many radio controlled PWM and PPM signal receivers
Real-time telemetry data transmission
Supports OSD telemetry (overlaying telemetry data on video transmission) using MAVLINK protocol
Configuration of flight points via Google Maps
On-board flash memory 16Mbit for automatic data logging
6 degrees of freedom in InvenSense accelerometer, gyroscope MPU-6000
Barometric pressure sensor upgraded to MS5611-01BA03 , from Measurement Specialties
Atmel ATmega2560-16AU controller and ATMEGA32U-2 chip for processing and USB function
Automatic firmware update when connected to the program
prisepro, Тут только встроенный компас есть, жалательно использовать внешний компас на подножке, чтобы убрать помехи от силовых частей. Обычно компас и ЖПС идут в одному корпусе, это желательно выносить на подальше от силовой.
Игорь Олишевский, Хм... Понятно. Все же есть вариант полета без выносной антенны) но я так понял это огромный риск!) Потому что все провода, регули могут дать сильные помехи. Спросил к тому что как то калхозно выглядит эта антена на подножке) так сказать - портит весь видон квадра. Спасибо за ответ.
не могу никак подключить компас из Ublox NEO-M8N к APM 2.6
перепробовал уже все что только можно. заливал скетч для ардуино . на шине i2c определяется адрес . тестовый скетч для компаса работает. mission planner не видит компас. кто сталкивался , что это может быть?
0
You need to be registered or authorized users to leave messages. Registration










Reviews and discussions
И хорошо бы добавить в описание вес, габариты, напряжение и ток питания
Извиняюсь - ток питания вообще-то измеряется в Амперах :)
перепробовал уже все что только можно. заливал скетч для ардуино . на шине i2c определяется адрес . тестовый скетч для компаса работает. mission planner не видит компас. кто сталкивался , что это может быть?
Registration