ArduPilot Mega - це польотний контролер з повноцінним БПЛА (Безпілотного Літального апарату UAV) рішенням. Контролер, крім простого ручного керування, має безліч різних польотних режимів, зокрема й автоматичні місії, як-от політ за картою або заданим маршрутом за встановленими точками. Функція передачі телеметрії в обидва боки дасть змогу керувати апаратом протягом усього польоту через смартфон, планшет або комп'ютер. А вбудоване логування роботи мозку дасть змогу вести запис і переглядати технічні свідчення, як-от показання датчиків, GPS та інше.
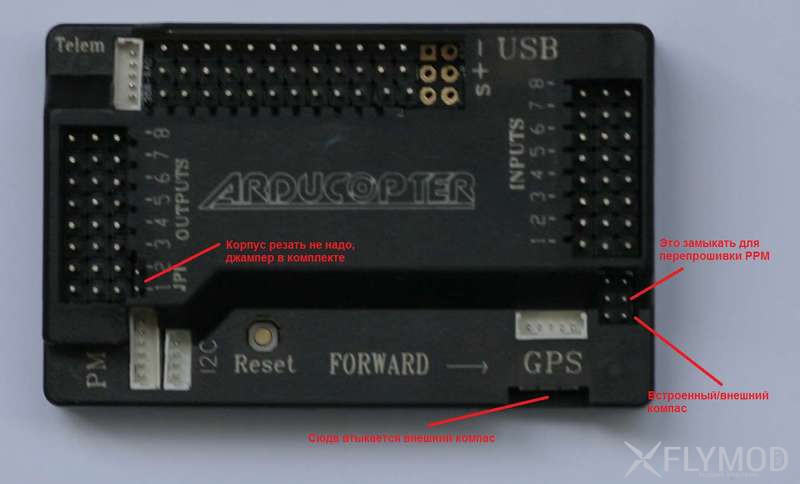
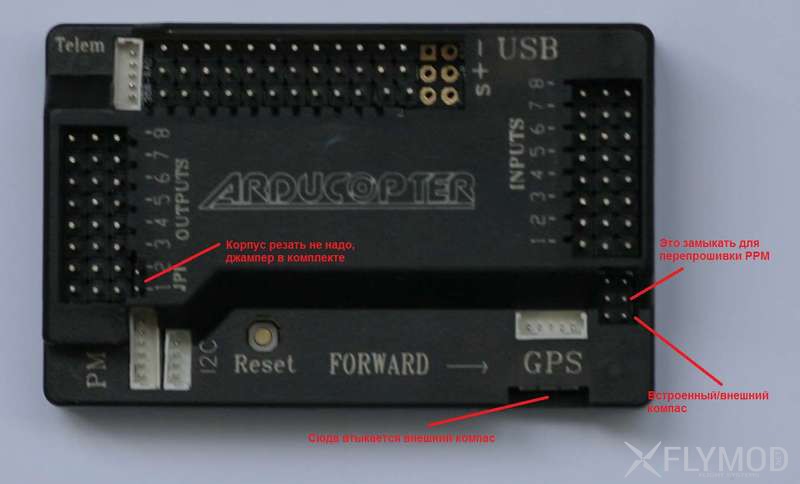
Зверніть увагу, що APM версії 2.8 має трохи іншу схему, ніж APM 2.6.
Ця версія на відміну від APM 2.6 має вбудований компас, а також деякі виправлення щодо вбудованого регулятора живлення.
Під час під'єднання зовнішнього GPS з компасом, необхідно вимкнути внутрішній компас на контролері за допомогою відповідної перемички.
Переваги
Низька ціна порівняно з іншими польотними контролерами такого функціоналу
Повноцінний автоматичний пілот
Встановлення до 166 польотних точок на карті
Редагування маршруту польоту на льоту
Відкритий вихідний код і ПЗ
Підтримка різних видів керованих засобів: трикоптера, квадрокоптера (рами Х, +, H, V), Гексакоптера, Октокоптера, Y6, X8, традиційні гелікоптери, літаки, машинки та човни
Особливості
3 осьовий гіроскоп, акселерометр і високоточний барометр
Система стабілізації з можливістю повітряної акробатики
Утримання позиції за GPS, політ по точках і повернення на точку старту
Можливість використання інфрачервоного датчика для обходу перешкод
Підтримка ультразвукового датчика (Sonar sensor) для автоматичного зльоту і посадки
Автоматичне проходження за маршрутними точками
Управління двигунами за допомогою ШІМ (PWM) з використанням дешевих регуляторів швидкості (ESC)
Власна система стабілізації для камери (функція контролера підвісу)
Радіозв'язок і телеметрія з борту
Підтримка безлічі рам і конфігурацій літаючих і їздових апаратів
Підтримка датчика рівня заряду батареї
Настроювана світлова індикація під час польотів
Сумісний з багатьма радіокерованими приймачами PWM і PPM сигналів
Передання в реальному часі телеметричних даних
Підтримка OSD телеметрії (накладення на відеопередачу телеметричних даних) використовуючи протокол MAVLINK
Конфігурування точок польоту за допомогою Google Maps
Бортова флеш пам'ять 16Мбіт для автоматичної реєстрації даних
6 ступенів свободи в InvenSense акселерометрі, гіроскоп MPU-6000
Датчик барометричного тиску оновлено до MS5611-01BA03, від Measurement Specialties
Контролер Atmel ATmega2560-16AU і ATMEGA32U-2 чіп для обробки і функції USB
Автоматичне оновлення прошивки при підключенні до програми
prisepro, Тут только встроенный компас есть, жалательно использовать внешний компас на подножке, чтобы убрать помехи от силовых частей. Обычно компас и ЖПС идут в одному корпусе, это желательно выносить на подальше от силовой.
Игорь Олишевский, Хм... Понятно. Все же есть вариант полета без выносной антенны) но я так понял это огромный риск!) Потому что все провода, регули могут дать сильные помехи. Спросил к тому что как то калхозно выглядит эта антена на подножке) так сказать - портит весь видон квадра. Спасибо за ответ.
не могу никак подключить компас из Ublox NEO-M8N к APM 2.6
перепробовал уже все что только можно. заливал скетч для ардуино . на шине i2c определяется адрес . тестовый скетч для компаса работает. mission planner не видит компас. кто сталкивался , что это может быть?
0
Для того, щоб залишати повідомлення, потрібно бути зареєстрованим або авторизованим користувачем. Реєстрація









Огляди та обговорення
И хорошо бы добавить в описание вес, габариты, напряжение и ток питания
Извиняюсь - ток питания вообще-то измеряется в Амперах :)
перепробовал уже все что только можно. заливал скетч для ардуино . на шине i2c определяется адрес . тестовый скетч для компаса работает. mission planner не видит компас. кто сталкивался , что это может быть?
Реєстрація