ArduPilot Mega - это полетный контроллер с полноценным БПЛА (Беспилотного Летающего аппарата UAV) решением. Контроллер, помимо простого ручного управления, имеет массу различных полетных режимов, в том числе и автоматические миссии, такие как полет по карте или заданному маршруту по установленным точкам. Функция передачи телеметрии в обе стороны позволит управлять аппаратом на протяжении всего полета через смартфон, планшет или компьютер. А встроенное логирование работы мозга, даст возможность вести запись и просматривать технические показания, такие как показания датчиков, GPS и другое.
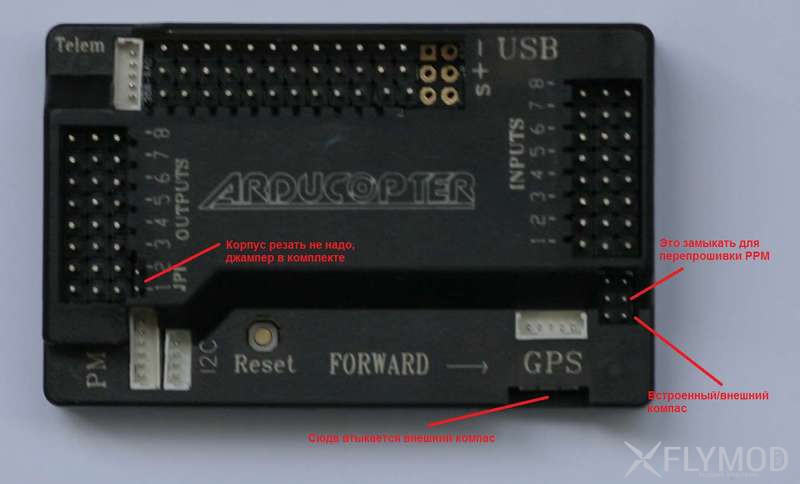
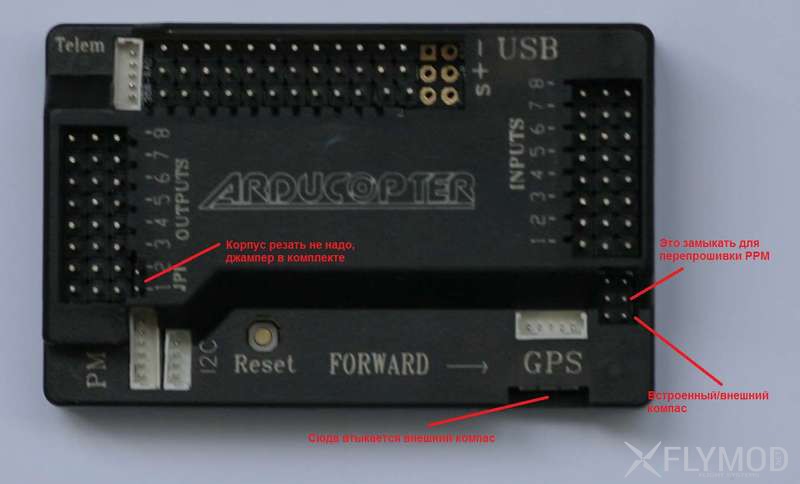
Обратите внимание, что APM версии 2.8 имеет немного другую схему, чем APM 2.6.
Данная версия в отличии от APM 2.6 имеет встроенный компас, а так же некоторые исправления по встроенному регулятору питания.
При подключении внешнего GPS с компасом, необходимо отключить внутренний компас на контроллере с помощью соответствующей перемычки.
Приемущества
Низкая цена по сравнению с другими полетными контроллерами такого функционала
Полноценный автоматический пилот
Установка до 166 полетных точек на карте
Редактирование маршрута полета на лету
Открытый исходный код и ПО
Поддержка различных видов управляемых средств: трикоптера, квадрокоптера (рамы Х, +, H, V), Гексакоптера, Октокоптера, Y6, X8, традиционные вертолеты, самолеты, машинки и лодки
Особенности
3 осевой гироскоп, акселерометр и высокоточный барометр
Система стабилизации с возможностью воздушной акробатики
Удержание позиции по GPS, полет по точкам и возврат на точку старта
Возможность использования инфракрасного датчика для обхода препятствий
Поддержка ультразвукового датчика (Sonar sensor) для автоматического взлета и посадки
Автоматическое следование по маршрутным точкам
Управление двигателями посредством ШИМ (PWM) с использованием дешевых регуляторов скорости (ESC)
Собственная система стабилизации для камеры (функция контроллера подвеса)
Радиосвязь и телеметрия с борта
Поддержка множества рам и конфигураций летающих и ездящих аппаратов
Поддержка датчика уровня заряда батареи
Настраиваемая световая индикация при полетах
Совместим с многими радиоуправляемыми приемниками PWM и PPM сигналов
Передача в реальном времени телеметрических данных
Поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK
Конфигурирование точек полета посредством Google Maps
Бортовая флеш память 16Мбит для автоматической регистрации данных
6 степеней свободы в InvenSense акселерометре , гироскоп MPU-6000
Датчик барометрического давления обновлен до MS5611-01BA03 , от Measurement Specialties
Контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB
Автоматическое обновление прошивки при подключении к программе
prisepro, Тут только встроенный компас есть, жалательно использовать внешний компас на подножке, чтобы убрать помехи от силовых частей. Обычно компас и ЖПС идут в одному корпусе, это желательно выносить на подальше от силовой.
Игорь Олишевский, Хм... Понятно. Все же есть вариант полета без выносной антенны) но я так понял это огромный риск!) Потому что все провода, регули могут дать сильные помехи. Спросил к тому что как то калхозно выглядит эта антена на подножке) так сказать - портит весь видон квадра. Спасибо за ответ.
не могу никак подключить компас из Ublox NEO-M8N к APM 2.6
перепробовал уже все что только можно. заливал скетч для ардуино . на шине i2c определяется адрес . тестовый скетч для компаса работает. mission planner не видит компас. кто сталкивался , что это может быть?
0
Для того, чтобы оставлять сообщения, необходимо быть зарегистрированным или авторизованным пользователем. Регистрация










Отзывы и обсуждения
И хорошо бы добавить в описание вес, габариты, напряжение и ток питания
Извиняюсь - ток питания вообще-то измеряется в Амперах :)
перепробовал уже все что только можно. заливал скетч для ардуино . на шине i2c определяется адрес . тестовый скетч для компаса работает. mission planner не видит компас. кто сталкивался , что это может быть?
Регистрация