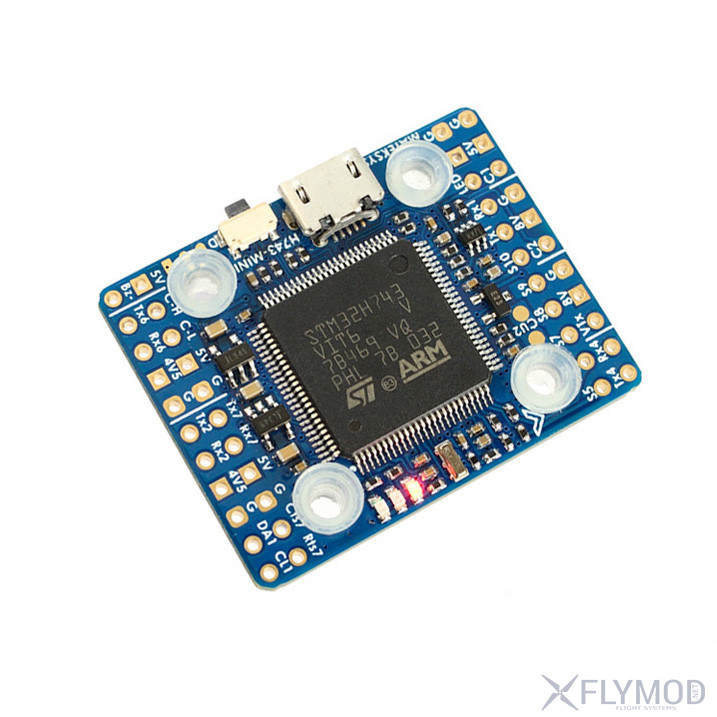
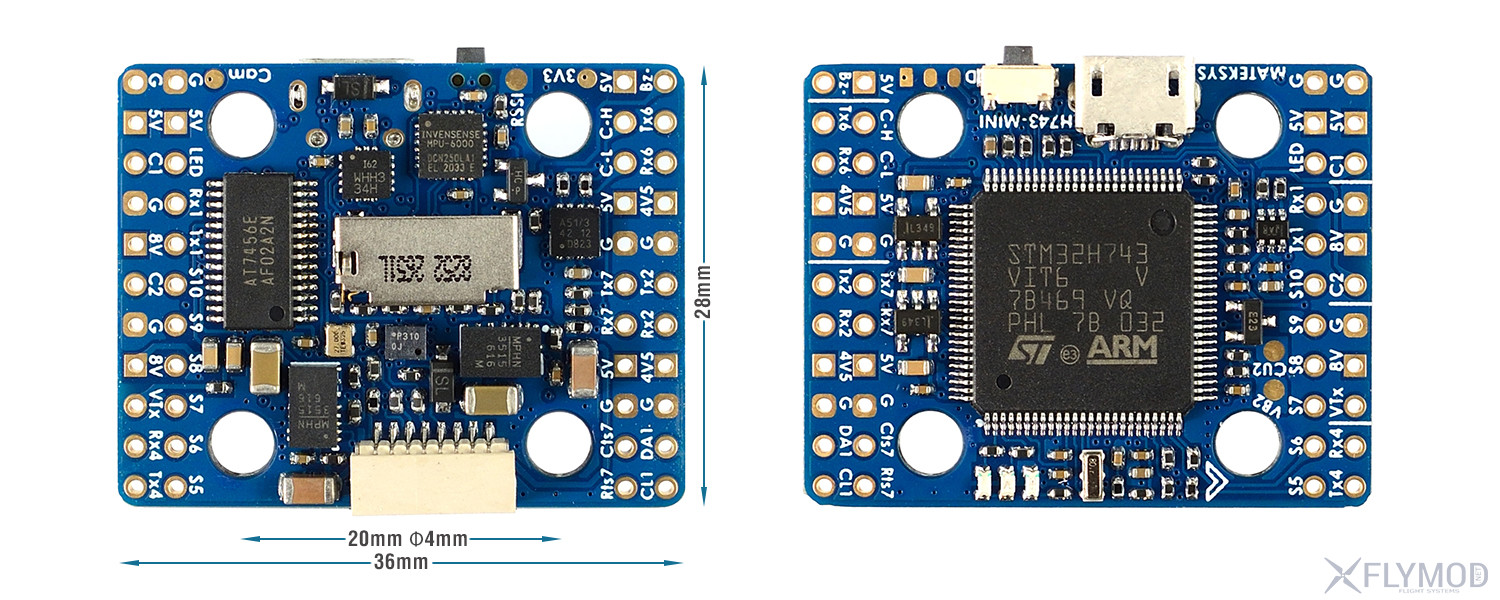
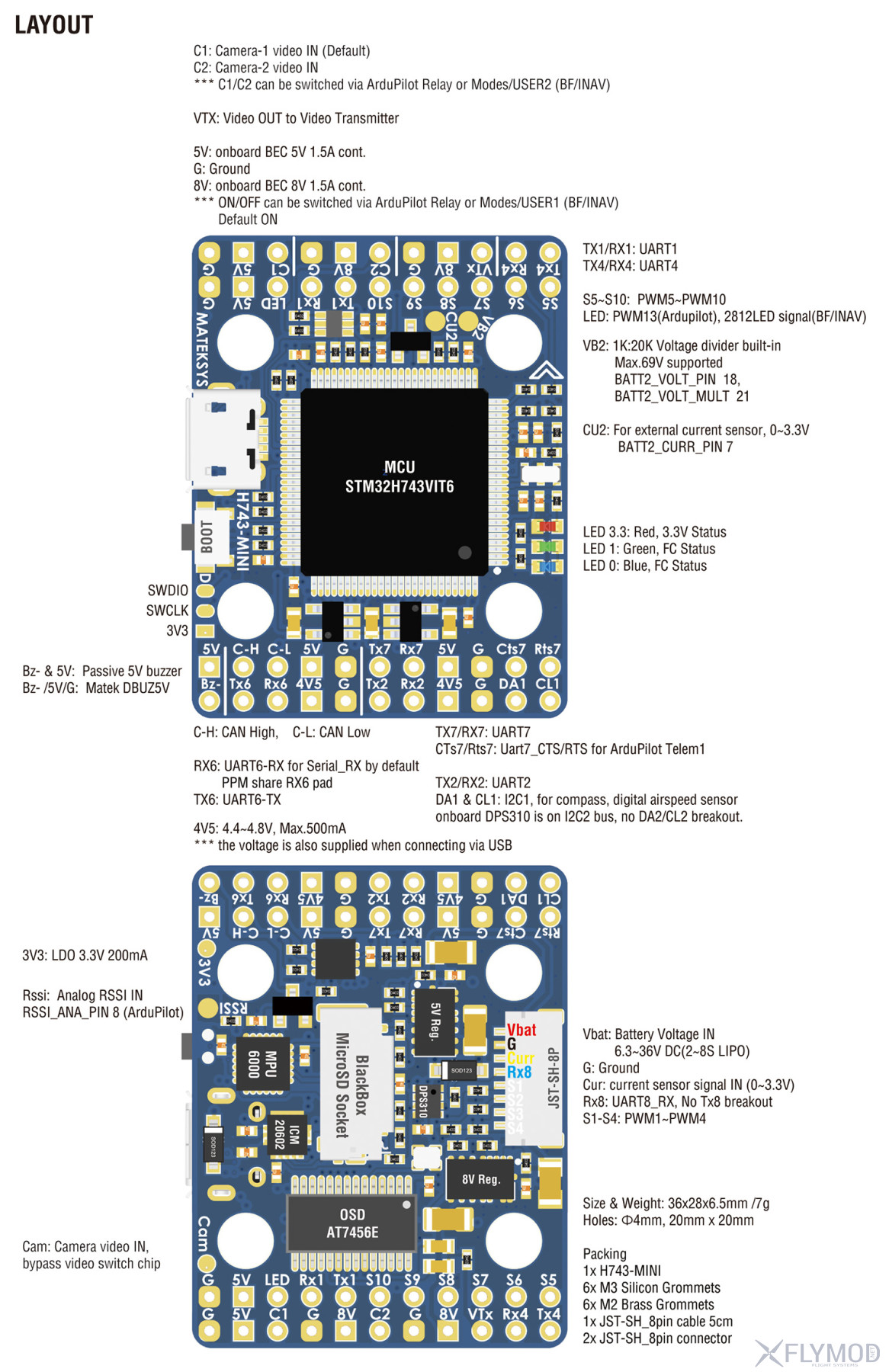
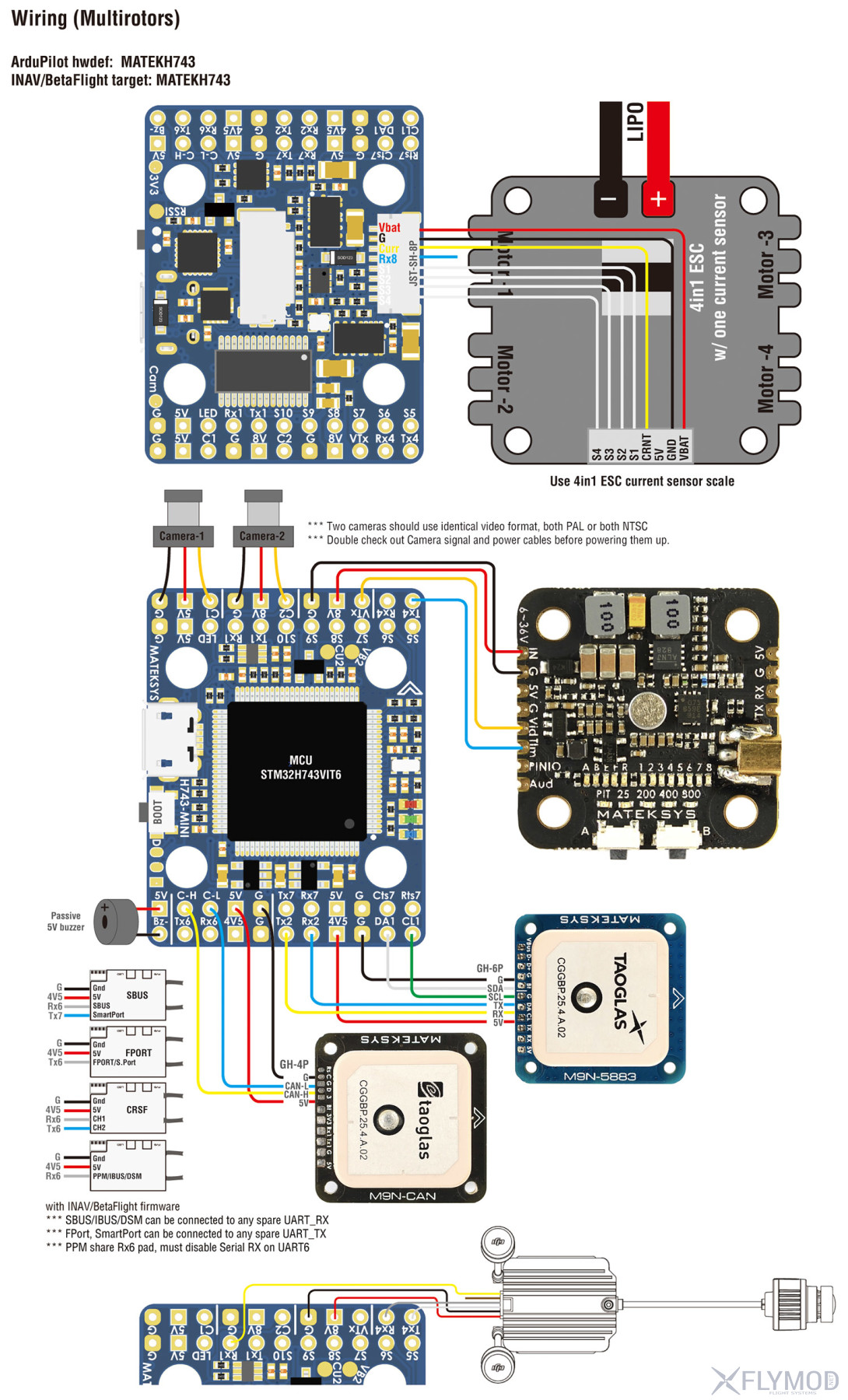
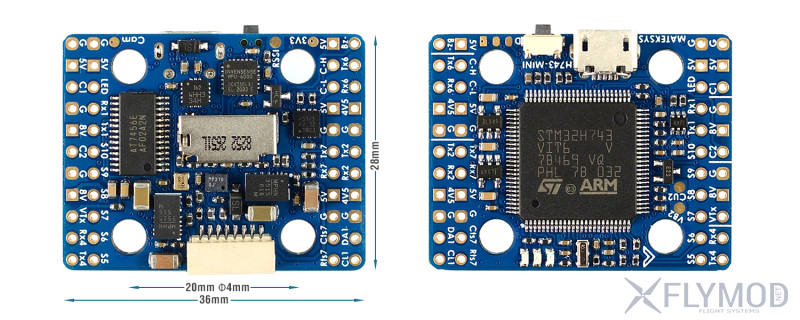
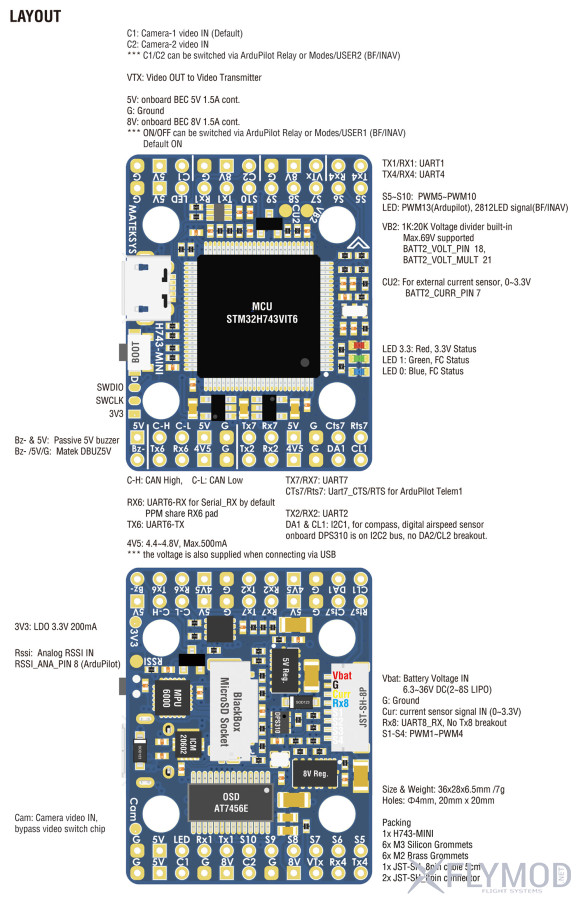
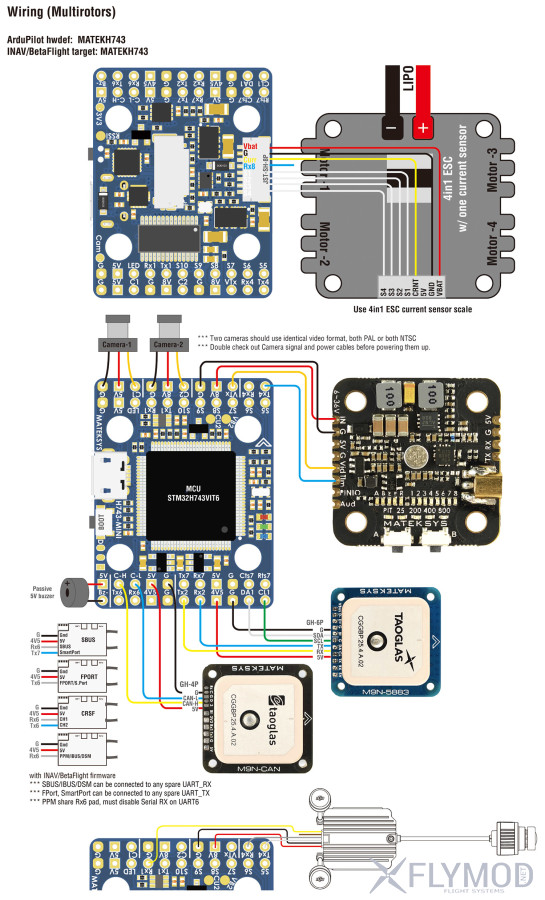
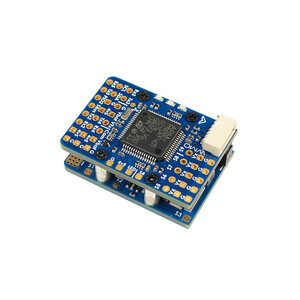
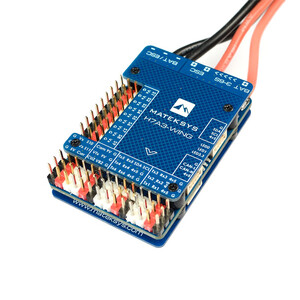
Контролер польоту Matek H743-Mini - це зменшена версія контролера Matek H743-SLIM, яка має монтажну схему 20 х 20мм. Контролер оснащений надшвидким сучасним процесором H7, що працює на частоті 480MHz і оперативною пам'яттю 1Mb! При вазі 7 грам і розмірі 36 х 28мм, має на платі вбудований точний барометр Infineon DPS310, два гіроскопи MPU6000 і ICM20602, слот MicroSD для запису логів. Так само як і більший аналог H743-WING, має порт CAN BUS для підтримки під'єднання майбутніх спеціальних периферійних пристроїв із шиною CAN. H743-Mini відрізняється від H743-SLIM меншою кількістю майданчиків і роз'ємів, наприклад, відсутній вихід SPI3 breakout, зменшилася кількість виходів PWM з 13 до 11 і кількість UART-портів з 7 до 5.5 (1, 2, 4, 6, 7, Rx8), прибрано роз'єм JST-GH1.25 4pin, але водночас додано BEC на 8V.
Matek H743-SLIM працює з прошивками ArduPilot, BetaFlight і вже з'явилася підтримка iNAV з версії 3.0.1 (стежте за оновленнями на оф. сторінці прошивок).
Починаючи з версії V1.5 на контролері в якості другого гіроскопа замість ICM20602 використовується ICM42605.
Характеристики
Процесор: STM32H743VIT6, 480MHz, 1Mb ОЗП, пам'ять 2Mb
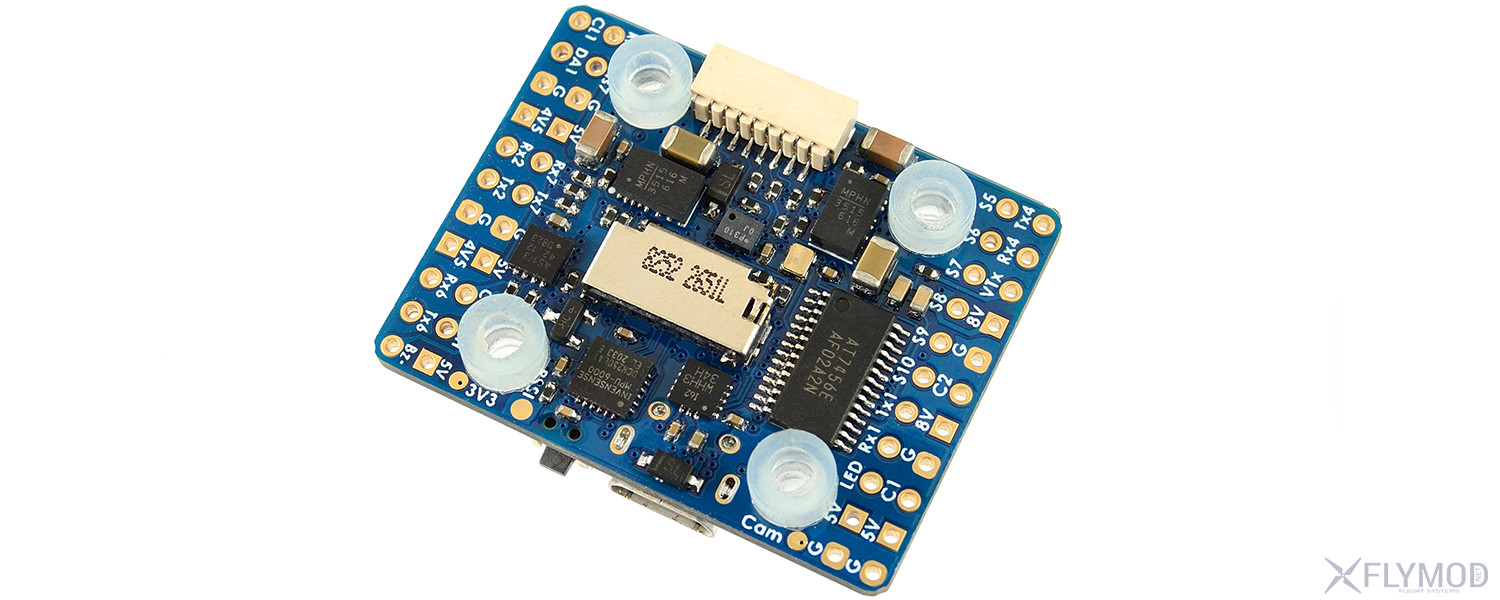
Акселерометр / гіроскоп: MPU6000 (SPI1) і ICM20602 (SPI4)
Барометр: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: слот для карт MicroSD (SDIO)
UART порти: 5.5 (1, 2, 4, 6, 7, Rx8)
OSD DJI FPV підтримується будь-яким запасним UART
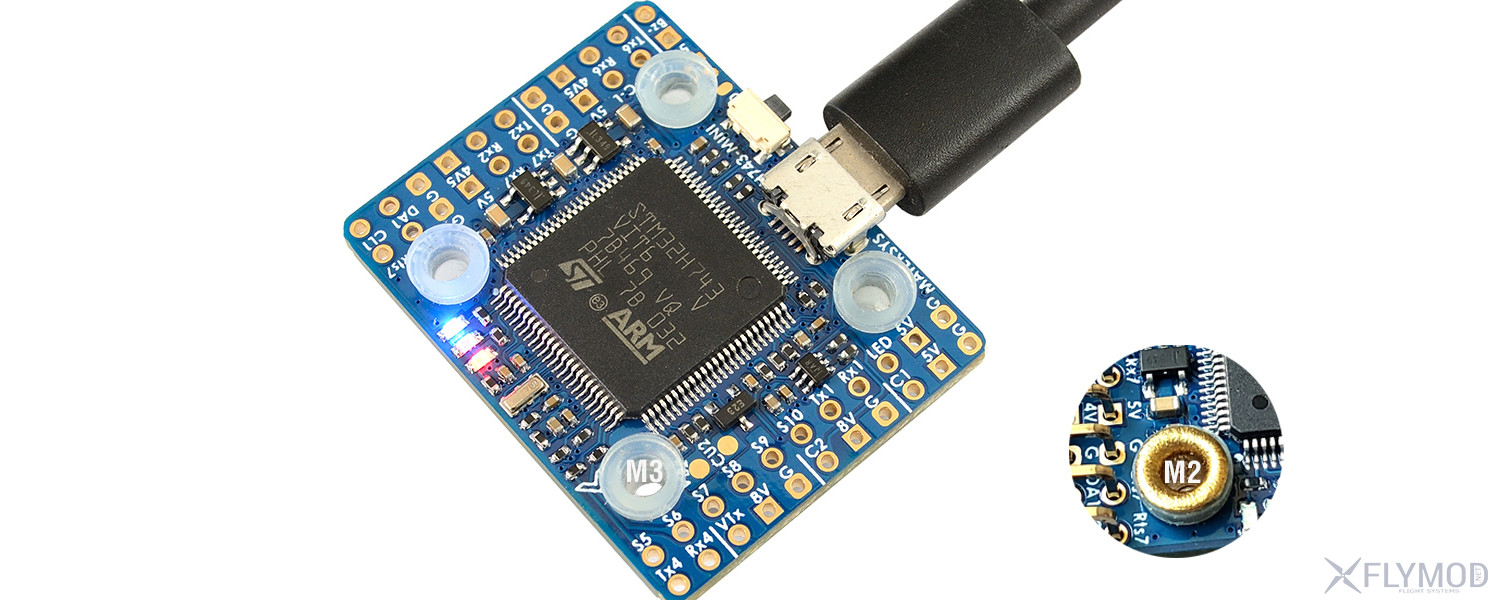
PWM виходи: 11 (S1 ~ S10, LED)
I2C порти: 2 (контакти I2C1 / DA1 CL1, без виходу I2C2)
CAN порт: 1 (контакти C-H, C-L)
3 x світлодіоди для FC STATUS (синій, червоний) та індикатор 3.3V BEC (червоний)
Прошивка iNAV підтримує H743 починаючи з версії 3.0.1
BetaFlight мета MATEKH743 підтримується починаючи з версії 4.3
Якщо ви завантажите на контролер прошивку ArduPilot через конфігуратор INAV / BetaFlight. Відома проблема полягає в тому, що процес завантаження зависає на 50%, якщо вибрано "full chip erase". Настійно рекомендується використовувати STM32CubeProgrammer для видалення MCU і завантаження прошивки. Офіційна інструкція від Matek
Підтримка Crossfire існує тільки в "останній" версії 4.1, а не у версії 4.0.x, якщо ви завантажуєте "останню" версію 4.1, встановіть SERIAL7_PROTOCOL = 23, RSSI_TYPE = 3.
Відома проблема: Мотор 7 не буде обертатися з BetaFlight 4.2.x і мікшером OCTO X8, якщо ввімкнено фільтр обертів (RPM filter). Будь ласка, встановіть dshot_bidir = OFF або використовуйте останню версію BetaFlight 4.3.0.






Огляди та обговорення
Повідомлень поки що немає. Залиште своє повідомлення першим.
Реєстрація