Польотний контролер Matek H743-WING V3 використовує найсучасніший і найпродуктивніший процесор H743, що працює з частотою 480MHz і оперативною пам'яттю 1Mb. На платі є новий порт CAN для підтримки майбутніх периферійних UAVCAN пристроїв.
Matek H743-WING працює з прошивками ArduPilot, BetaFlight і iNAV.
Що нового в H743-Wing V3?
Замість двох гіроспокопів MPU6000(V2)+ICM42605 використовується новий гіроскоп ICM42688-P(V3)+ICM42605
Сумісний з новими версіями прошивок ArduPilot plane 4.2.0+ і INAV 5.0+
PDB/датчик струму переміщено з плати FC на нижню пластину
Переміщено 8A BEC з верхньої плати на нижню
Встановлено роз'єм JST-GH для порту CAN замість роз'єму JST-SH
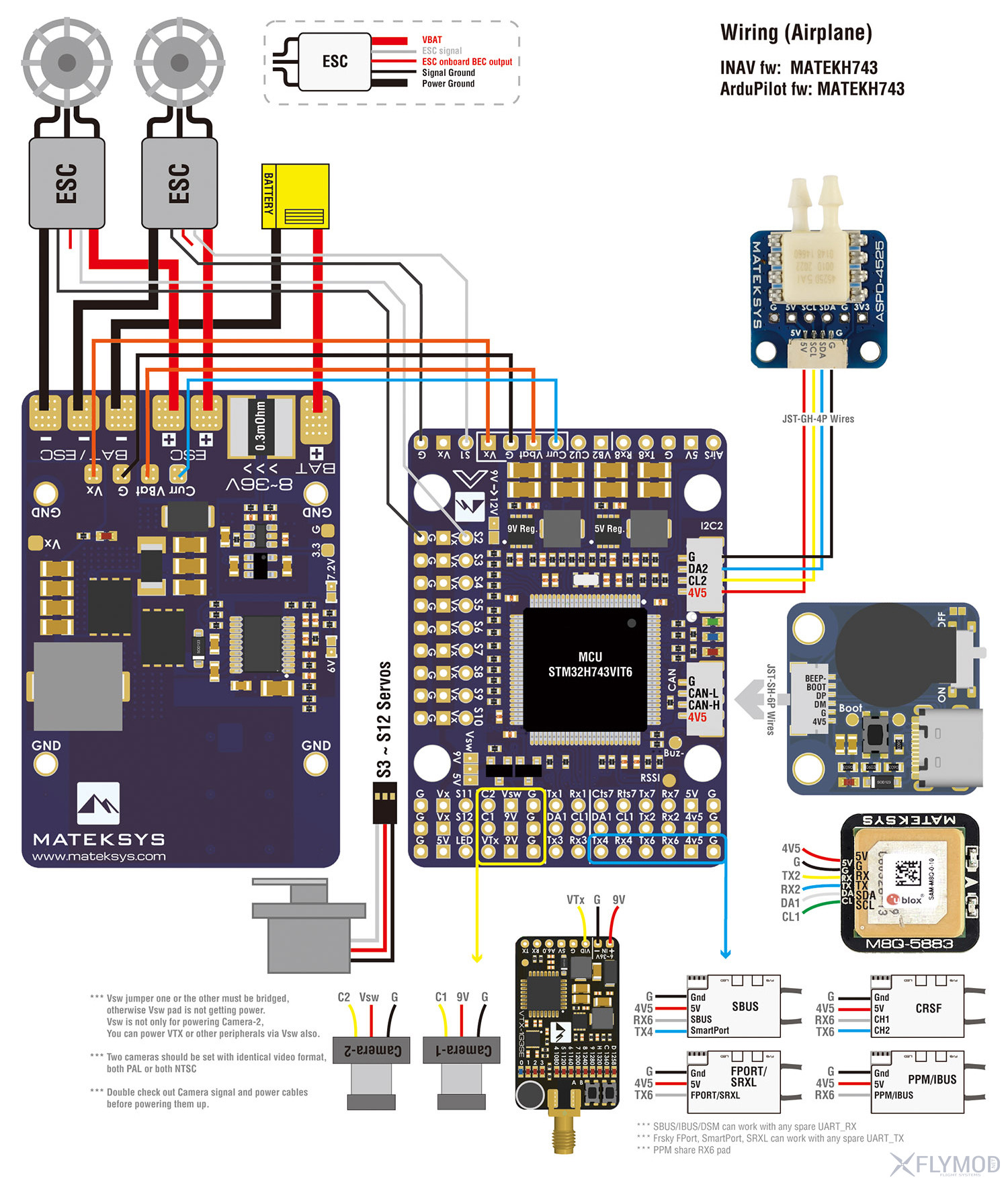
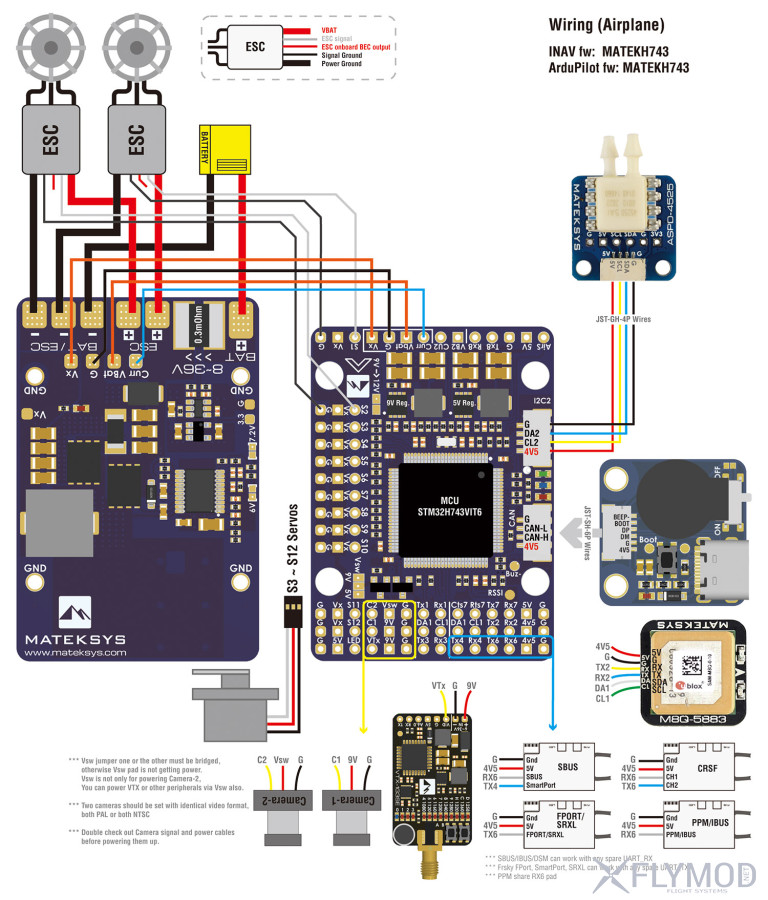
Додано роз'єм JST-GH для I2C2 для підключення за принципом plug and play з датчиком повітряної швидкості ASPD-4525
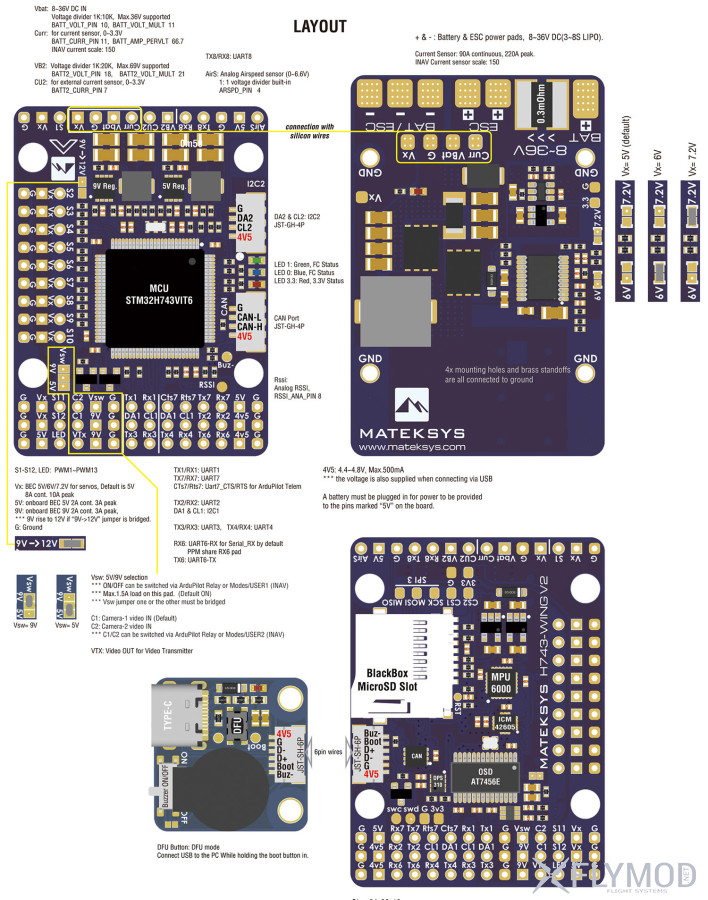
Характеристики
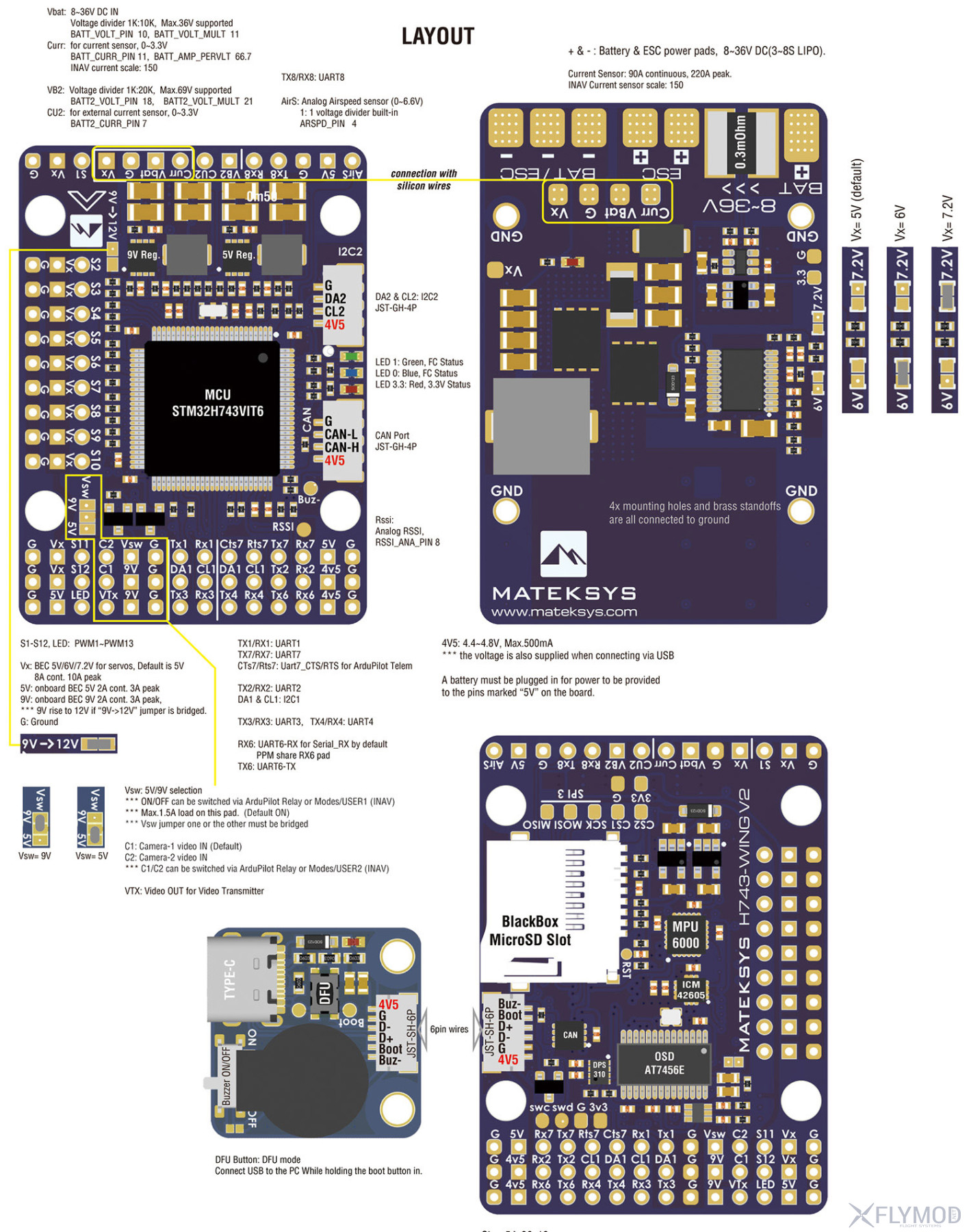
Процесор: STM32H743VIT6, 480MHz, 1Mb ОЗП, пам'ять 2Mb
Акселерометр / гіроскоп: ICM42688-P і ICM42605 (SPI4)
Барометр: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: слот для карт MicroSD (SDIO)
UART порти: 7 (1,2,3,4,6,7,8) з вбудованою інверсією
PWM виходи: 13 (включно зі світлодіодним майданчиком)
I2C порти: 2
CAN порт: 1
Вихід SPI3 breakout: 1
3 x світлодіоди для FC STATUS (синій, червоний) та індикатор 3.3V BEC (червоний)
ADC (АЦП): VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2
Окрема плата: USB Type-C / пищалка
Перемикаються входи для використання двох камер
Перемикається BEC: 5V / 9V (12V)
Датчик струму високої точності: є
Дільник напруги ADC VB2: 1K: 10K
Дільник напруги ADC AirSpeed: 10K: 10K
Управління INAV TR / SA VTX: є
Підтримка пищалки: є
RSSI: є
Підключення аналогового датчика швидкості: є
Підключення цифрового датчика швидкості: є
Статична потужність: 160mA при 5V
Прошивка INAV: MATEKH743
Прошивка: ArduPilot (ChiBiOS): MATEKH743
Прошивка BetaFlight: MATEKH743
Кріплення: 30.5 x 30.5 мм, діаметр отворів 4 мм, з прокладками 3 мм
Якщо ви завантажите прошивку ArduPilot на контролер через конфігуратор INAV / BetaFlight. Відома проблема полягає в тому, що процес завантаження зависає на 50%, якщо вибрано "full chip erase". Настійно рекомендується використовувати STM32CubeProgrammer для видалення MCU і завантаження прошивки. Офіційна інструкція від Matek
Підтримка Crossfire існує тільки в "останній" версії 4.1, а не у версії 4.0.x, якщо ви завантажуєте "останню" версію 4.1, встановіть SERIAL7_PROTOCOL = 23, RSSI_TYPE = 3.
Комплектація
1 х контролер польоту Matek H743-WING
1 x адаптер USB (Type-C) / пищалка (активний)
1 x кабель JST SH-4P - GH-4P для порту CAN, 20см
1 x кабель SH-6P - SH-6P для USB адаптера, 20см
1 x набір штирьових роз'ємів dupont 2.54 (роз'єми не припаяні до плати)
skybos, в aspd-dlvr используется новый датчик DLVR-L10D и есть два интерфейса: стандартный I2C и новый CAN, который пытается внедрить Matek на всех своих новых контроллерах на крыльях.








Огляди та обговорення
Реєстрація