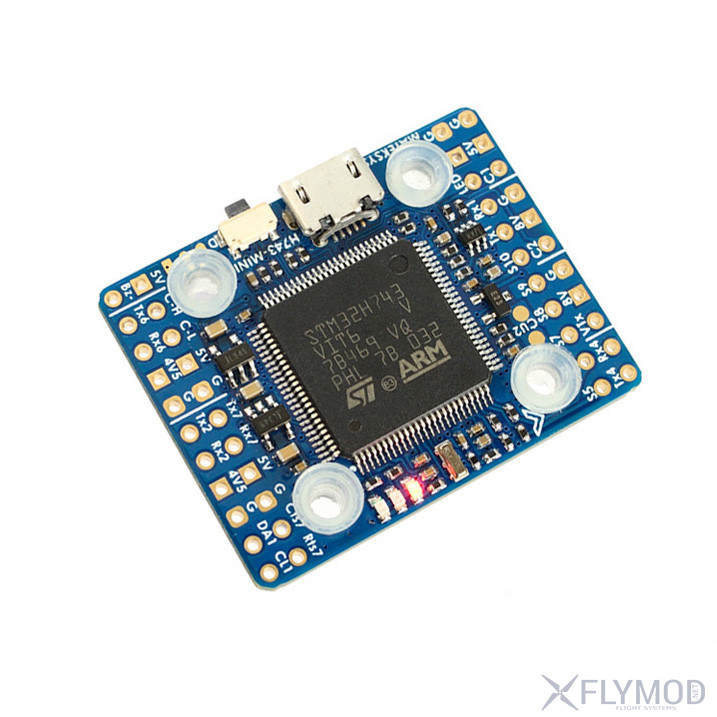
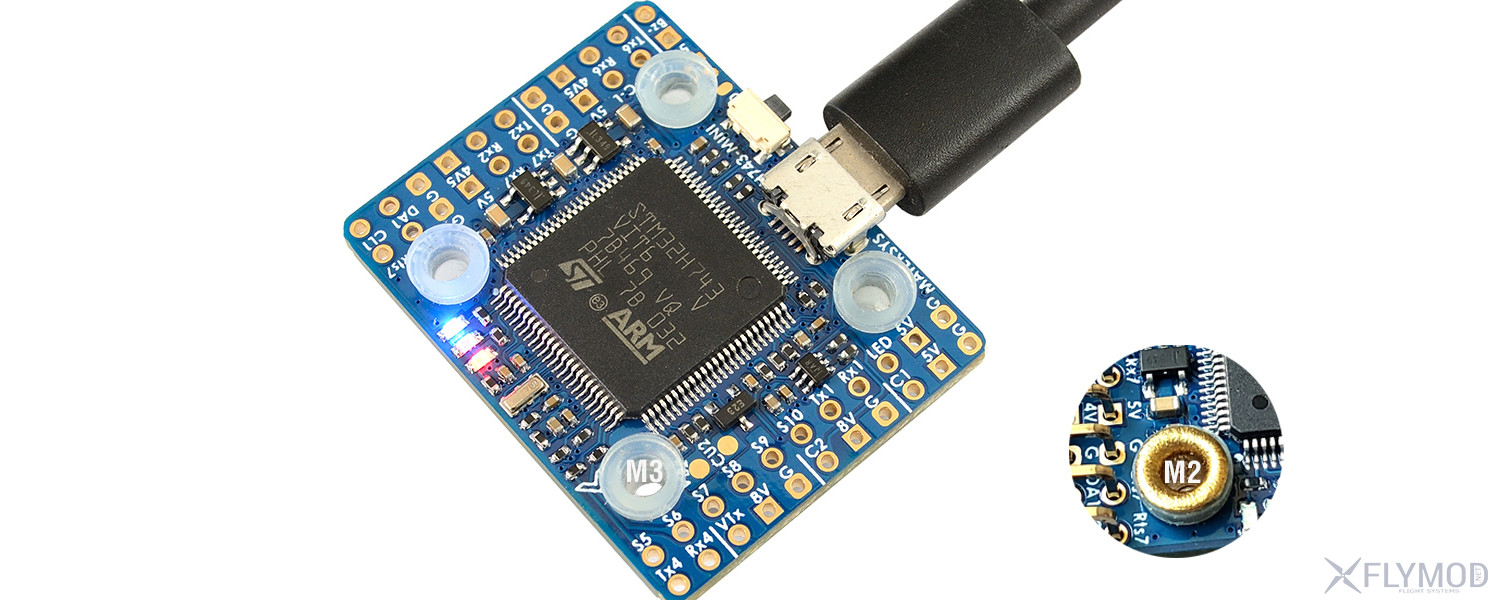
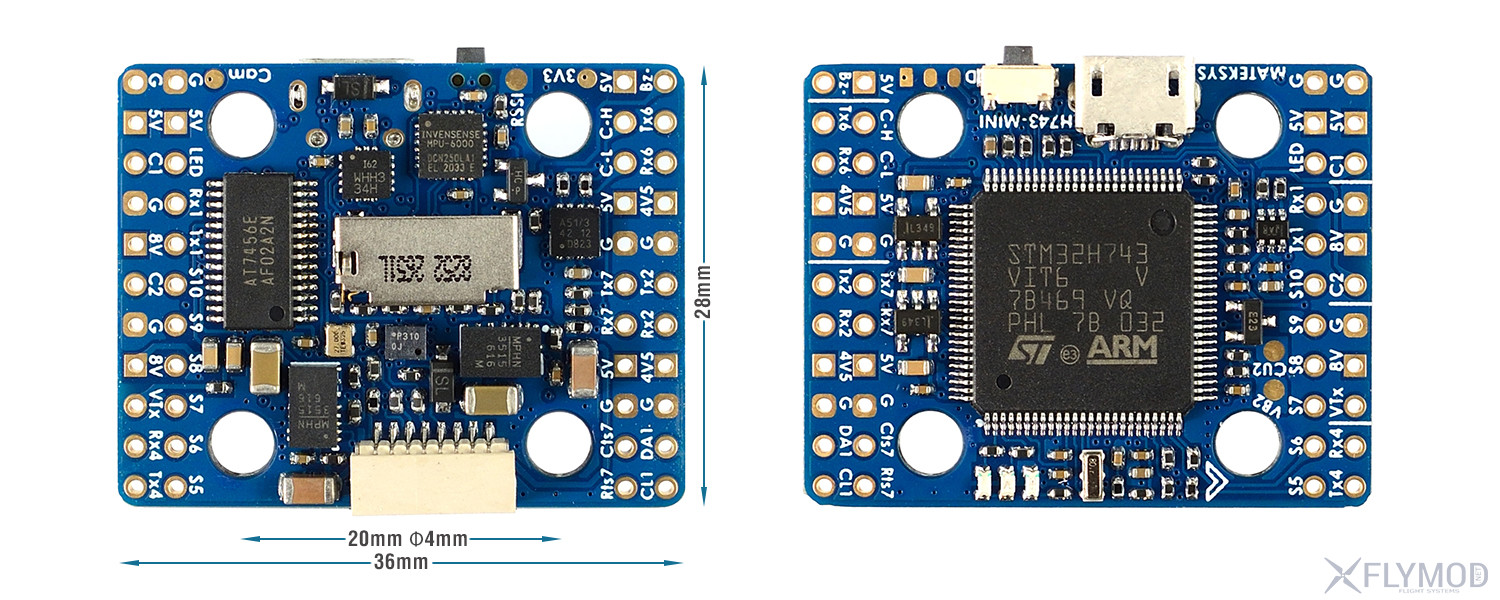
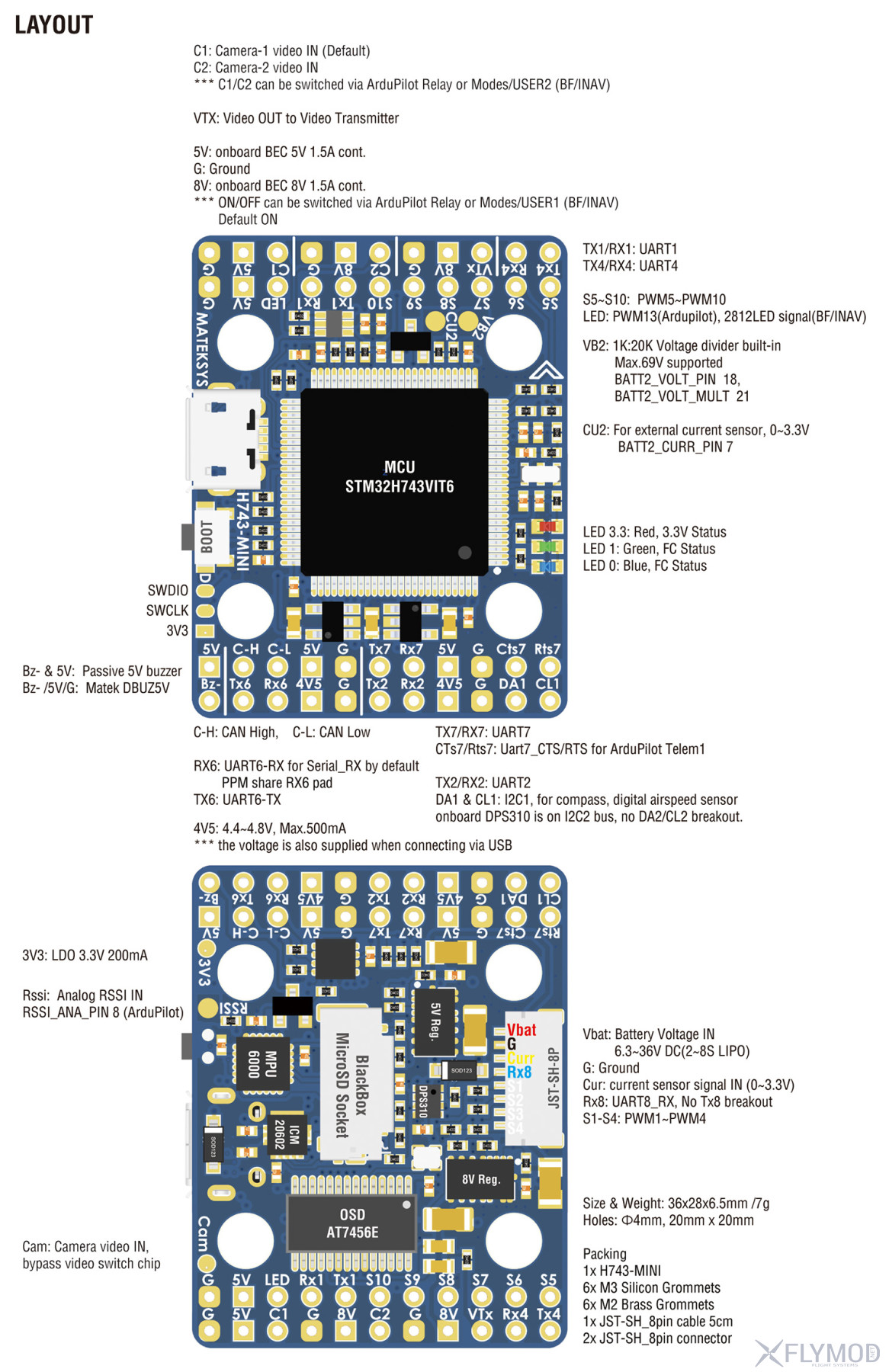
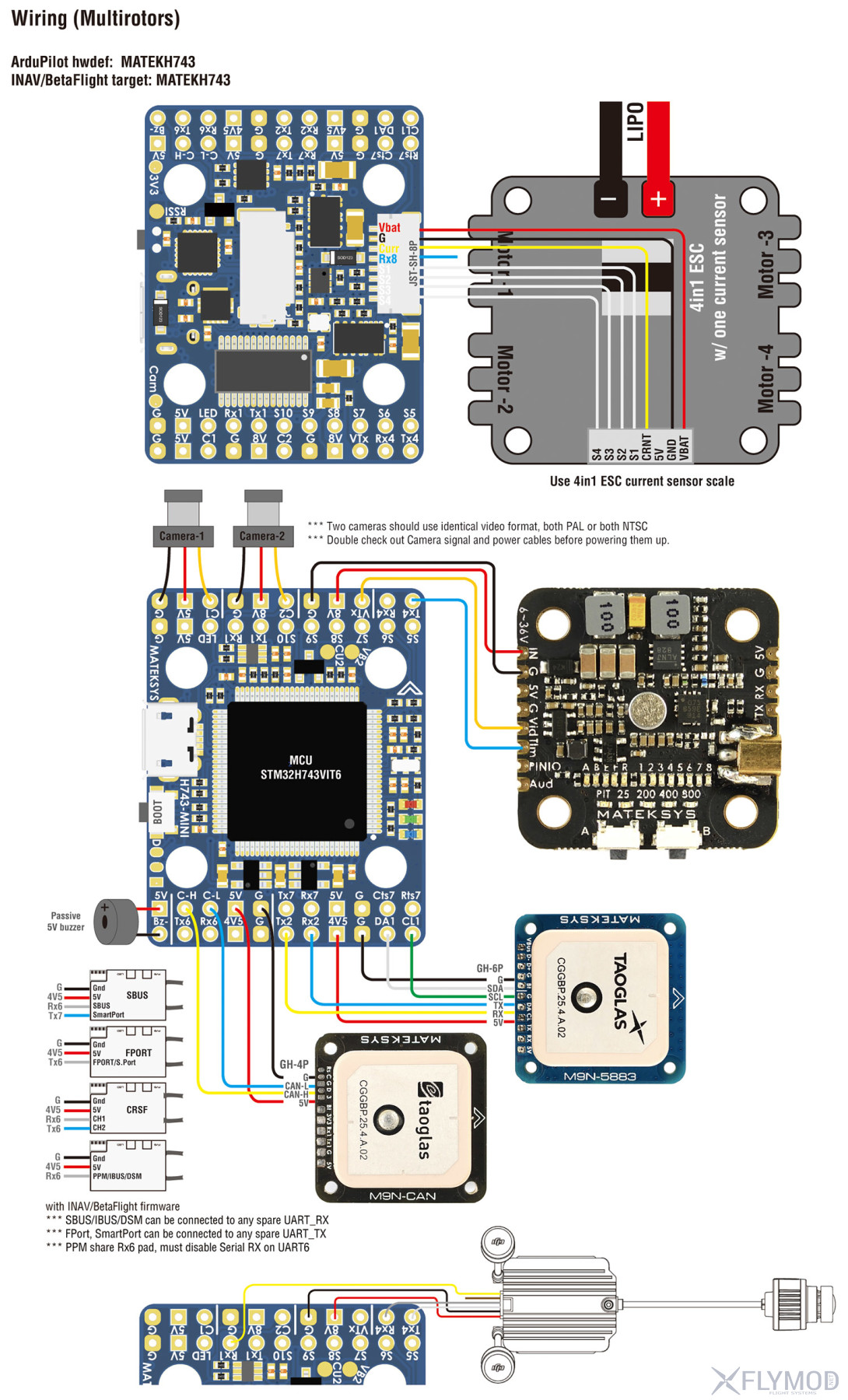
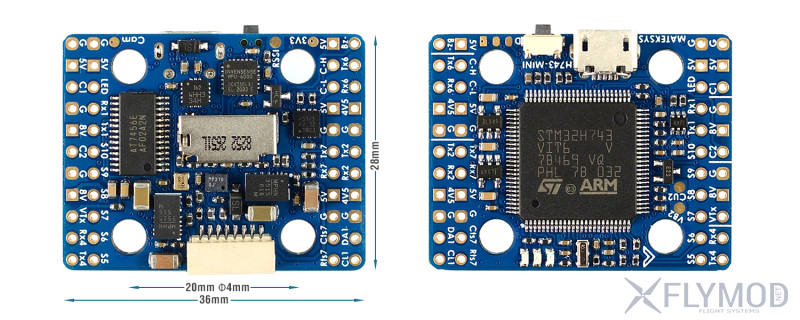
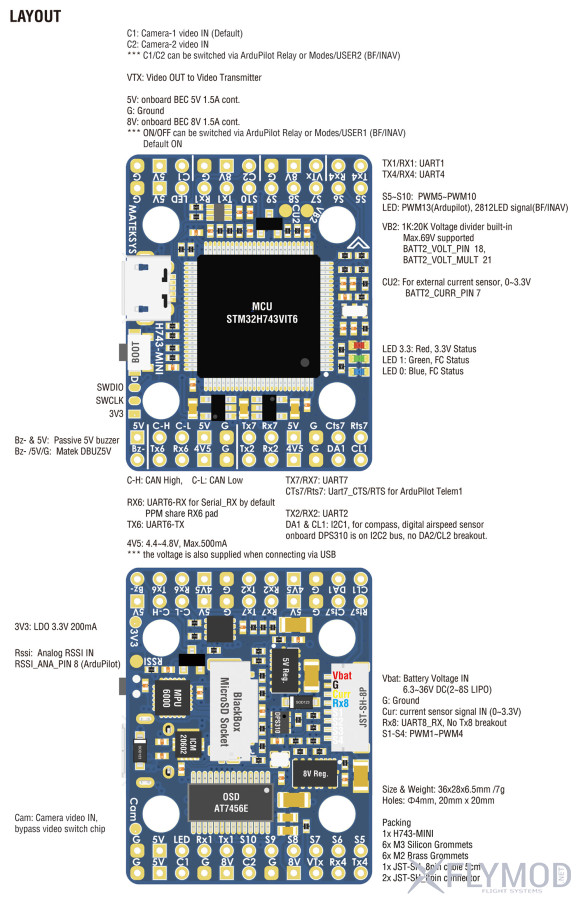
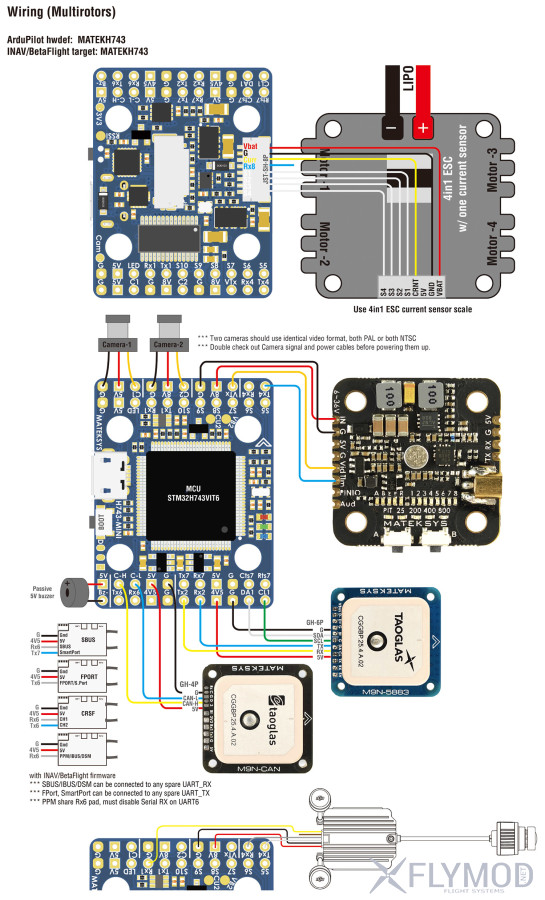
Контроллер полёта Matek H743-Mini это уменьшенная версия контроллера Matek H743-SLIM, которая имеет монтажную схему 20 х 20мм. Контроллер оснащен сверхбыстрым современным процессором H7, работающим на частоте 480MHz и оперативной памятью 1Mb! При весе 7 грамм и размере 36 х 28мм, имеет на плате встроенный точный барометр Infineon DPS310, два гироскопа MPU6000 и ICM20602, слот MicroSD для записи логов. Так же как и более крупный аналог H743-WING, имеет порт CAN BUS для поддержки подключения будущих специальных периферийных устройств с шиной CAN. H743-Mini отличается от H743-SLIM меньшим количеством площадок и разъемов, например отсуствует выход SPI3 breakout, уменьшилось кол-во выходов PWM c 13 до 11 и количество UART портов с 7 до 5.5 (1, 2, 4, 6, 7, Rx8), убран разъем JST-GH1.25 4pin, но при этом добавлен BEC на 8V.
Matek H743-SLIM работает с прошивками ArduPilot, BetaFlight и уже появилась поддержка iNAV с версии 3.0.1 (следите за обновлениями на оф. странице прошивок).
Начиная с версии V1.5 на контроллере в качестве второго гироскопа вместо ICM20602 используется ICM42605.
Характеристики
Процессор: STM32H743VIT6, 480MHz, 1Mb ОЗУ, память 2Mb
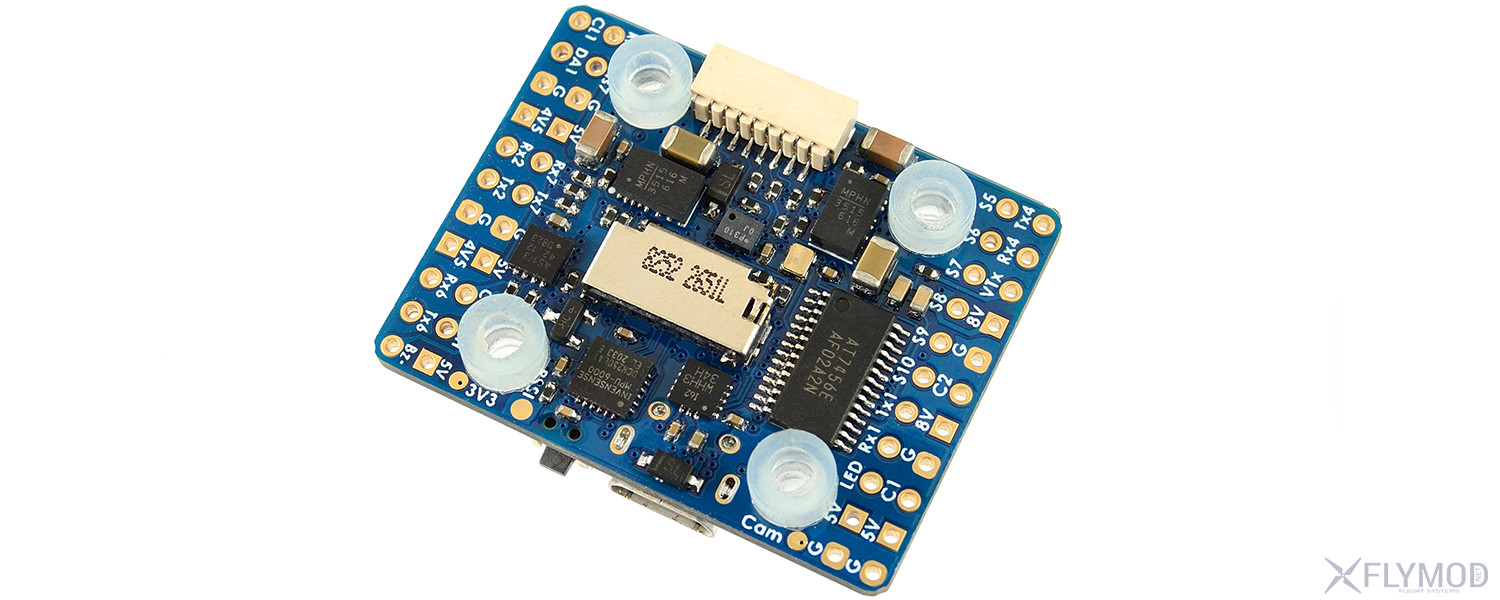
Акселерометр / гироскоп: MPU6000 (SPI1) и ICM20602 (SPI4)
Барометр: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: слот для карт MicroSD (SDIO)
UART порты: 5.5 (1, 2, 4, 6, 7, Rx8)
OSD DJI FPV поддерживается любым запасным UART
PWM выходы: 11 (S1 ~ S10, LED)
I2C порты: 2 (контакты I2C1 / DA1 CL1, без выхода I2C2)
CAN порт: 1 (контакты C-H, C-L)
3 x светодиоды для FC STATUS (синий, красный) и индикатор 3.3V BEC (красный)
Прошивка iNAV поддерживает H743 начиная с версии 3.0.1
BetaFlight цель MATEKH743 поддерживается начиная с версии 4.3
Если вы загрузите на контроллер прошивку ArduPilot через конфигуратор INAV / BetaFlight. Известная проблема состоит в том, что процесс загрузки зависает на 50%, если выбрано «full chip erase». Настоятельно рекомендуется использовать STM32CubeProgrammer для удаления MCU и загрузки прошивки. Официальная инструкция от Matek
Поддержка Crossfire существует только в «последней» версии 4.1, а не в версии 4.0.x, если вы загружаете «последнюю» версию 4.1, установите SERIAL7_PROTOCOL = 23, RSSI_TYPE = 3
Известная проблема: Мотор 7 не будет вращаться с BetaFlight 4.2.x и микшером OCTO X8, если включен фильтр оборотов (RPM filter). Пожалуйста, установите dshot_bidir = OFF или используйте последнюю версию BetaFlight 4.3.0.






Отзывы и обсуждения
Сообщений пока нет. Оставьте свое сообщение первым.
Регистрация