The Matek H743-WING V3 flight controller uses the most modern and efficient H743 processor, running at 480MHz and 1Mb of RAM. The board has a new CAN port to support future UAVCAN peripherals.
Matek H743-WING works with ArduPilot, BetaFlight and iNAV firmware.
What's new in H743-Wing V3?
Instead of two MPU6000(V2)+ICM42605 gyroscopes, a new ICM42688-P(V3)+ICM42605 gyroscope is used
Compatible with new versions of ArduPilot plane 4.2.0+ and INAV 5.0+ firmware
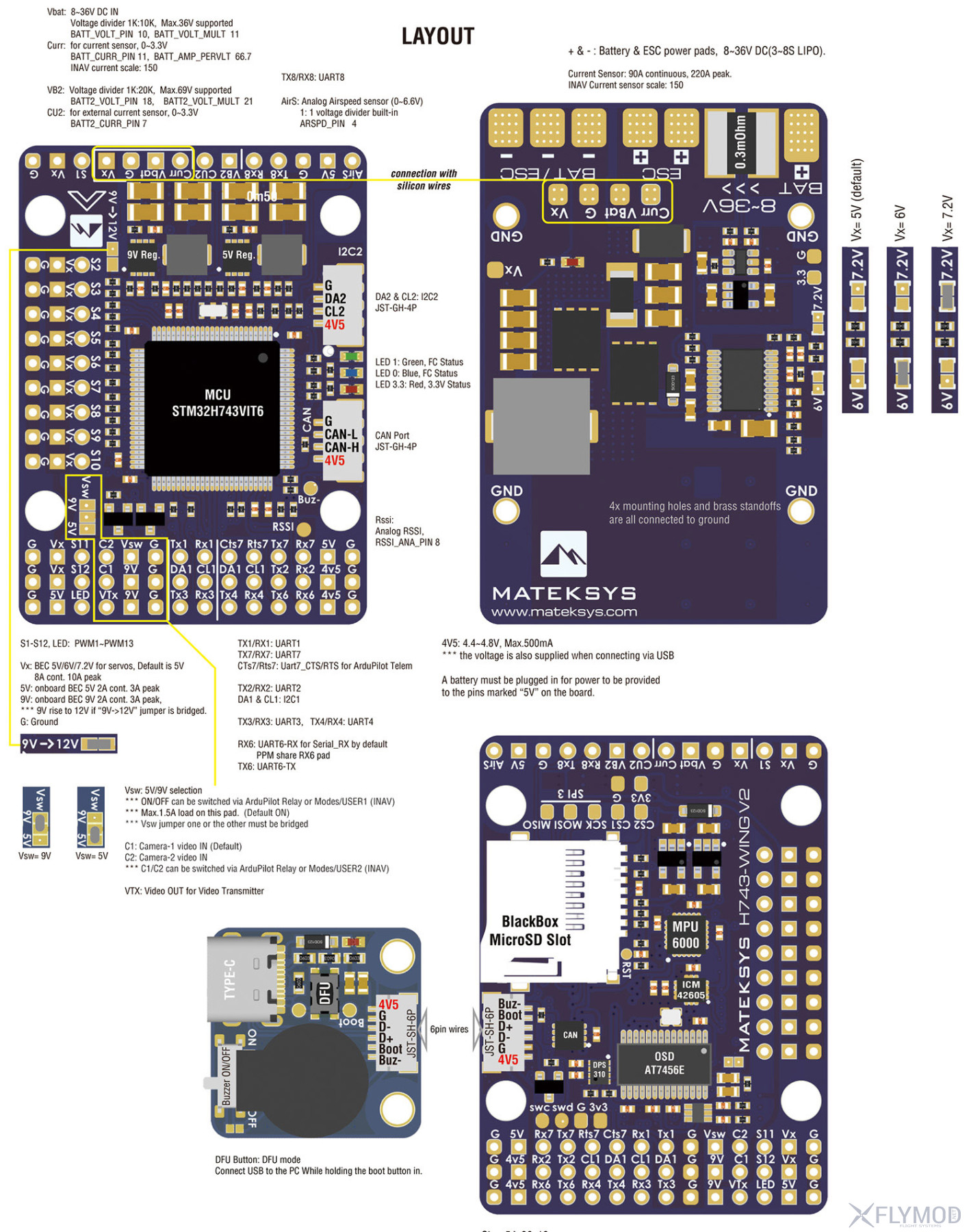
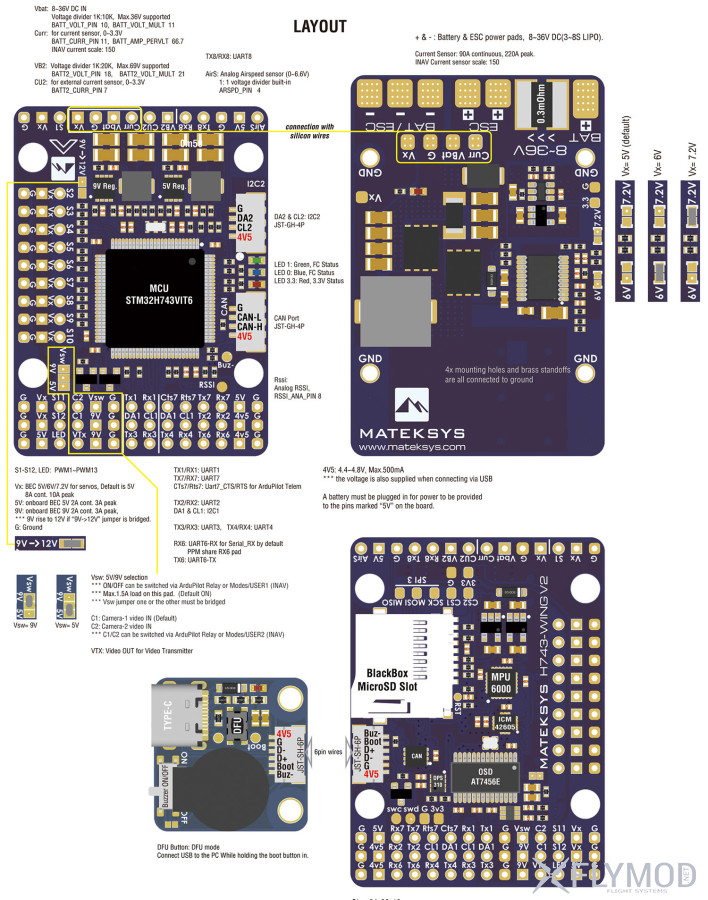
PDB/current sensor moved from FC board to bottom plate
Moved 8A BEC from the upper board to the lower one
Installed JST-GH connector for CAN port instead of JST-SH connector
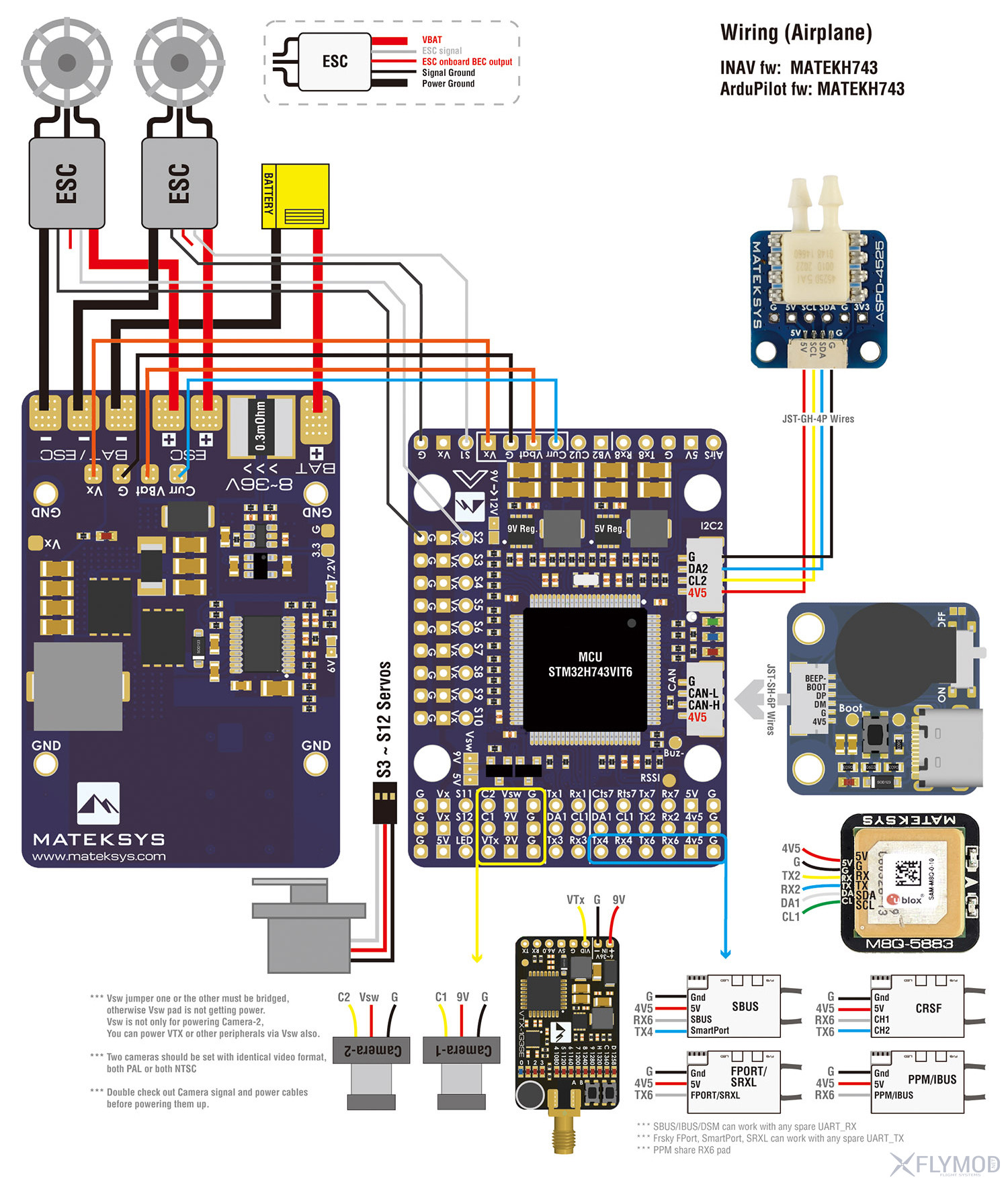
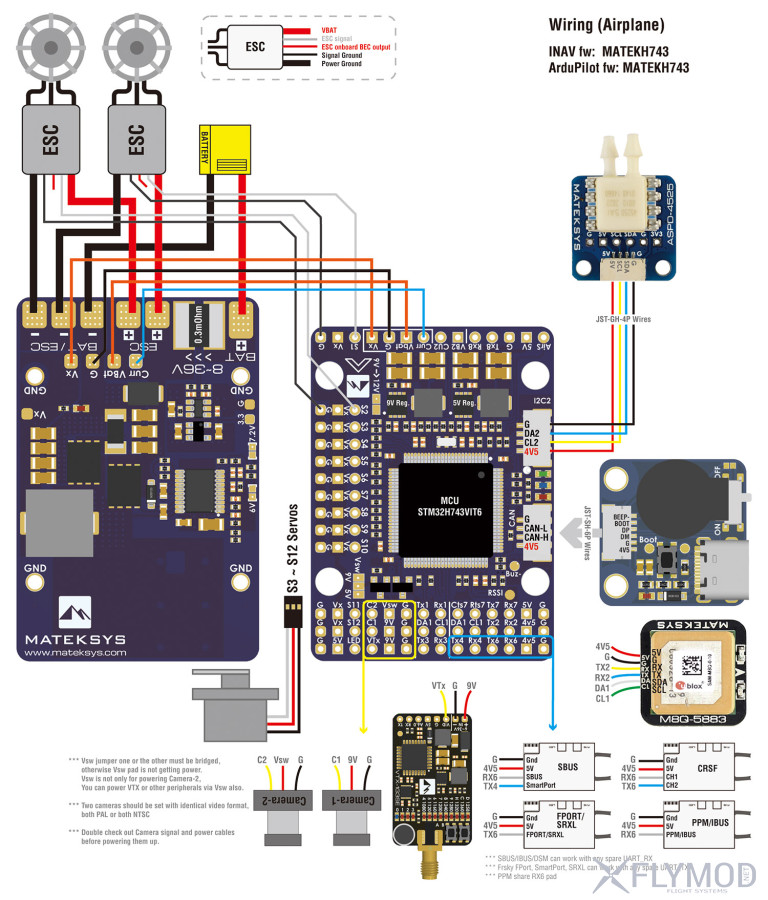
Added JST-GH connector for I2C2 for plug and play connection with ASPD-4525 air speed sensor
If you download the ArduPilot firmware to the controller via the INAV/BetaFlight configurator. A known issue is that the download process hangs at 50% if "full chip erase" is selected. It is strongly recommended to use STM32CubeProgrammer to erase the MCU and download the firmware. Official instructions from Matek
Crossfire support exists only in the "latest" version 4.1, not in version 4.0.x, if you download the "latest" version 4.1, set SERIAL7_PROTOCOL = 23, RSSI_TYPE = 3.
Package contents.
1 x Matek H743-WING flight controller
1 x USB (Type-C) adapter / squeaker (active)
1 x JST SH-4P - GH-4P cable for CAN port, 20cm
1 x SH-6P - SH-6P cable for USB adapter, 20cm
1 x set of dupont 2.54 pin connectors (connectors are not soldered to the board)
skybos, в aspd-dlvr используется новый датчик DLVR-L10D и есть два интерфейса: стандартный I2C и новый CAN, который пытается внедрить Matek на всех своих новых контроллерах на крыльях.








Reviews and discussions
Registration