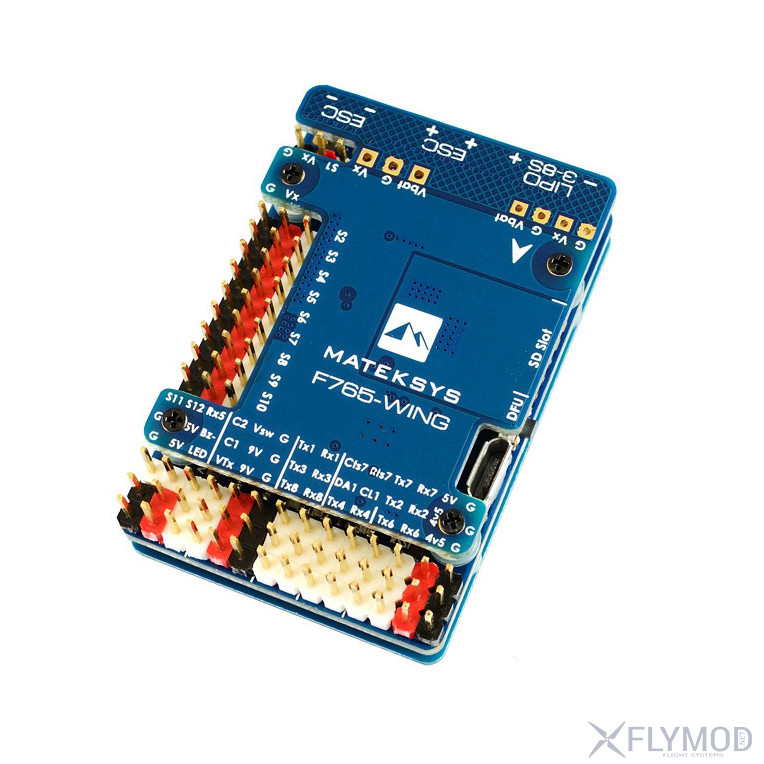
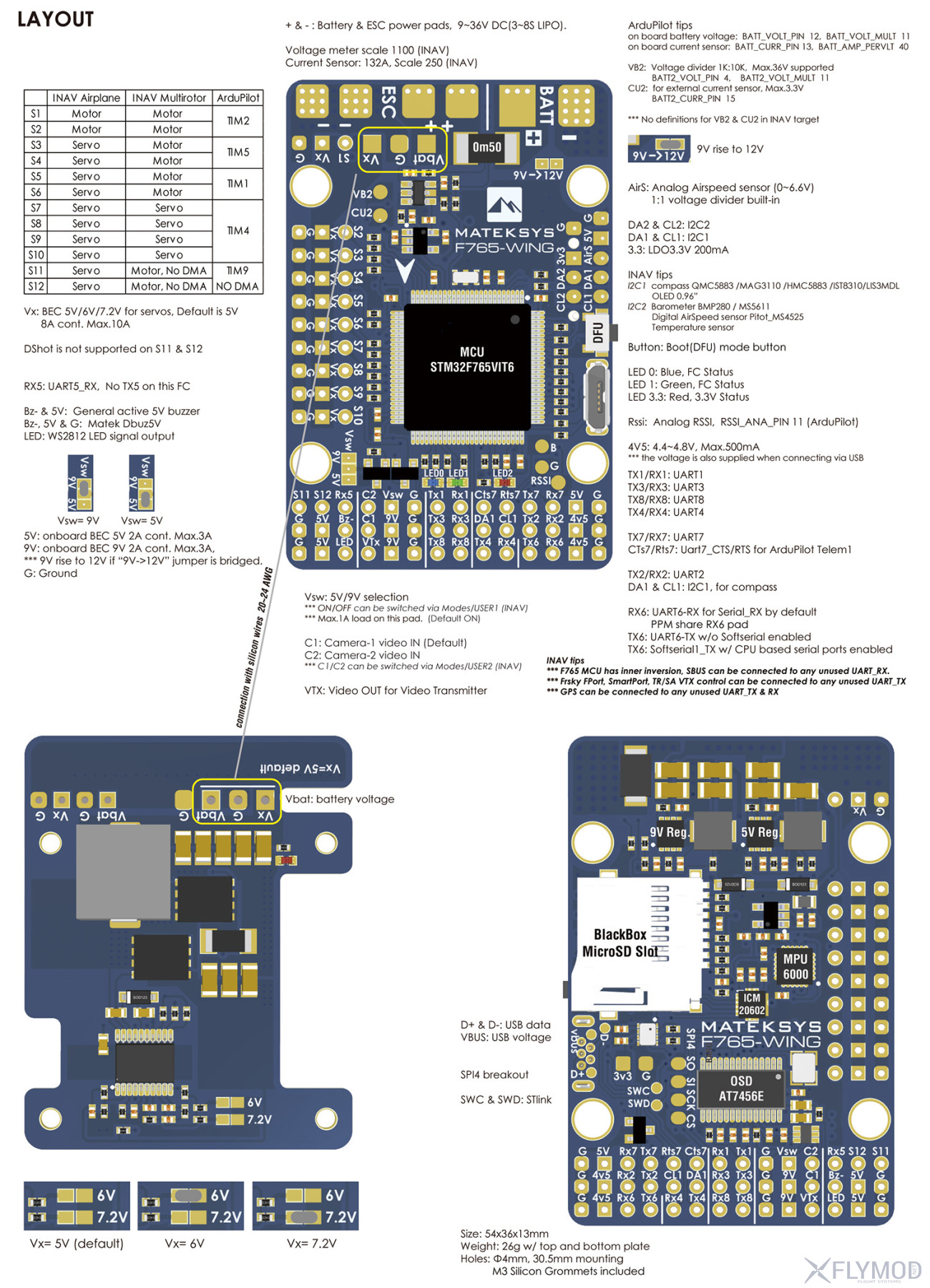
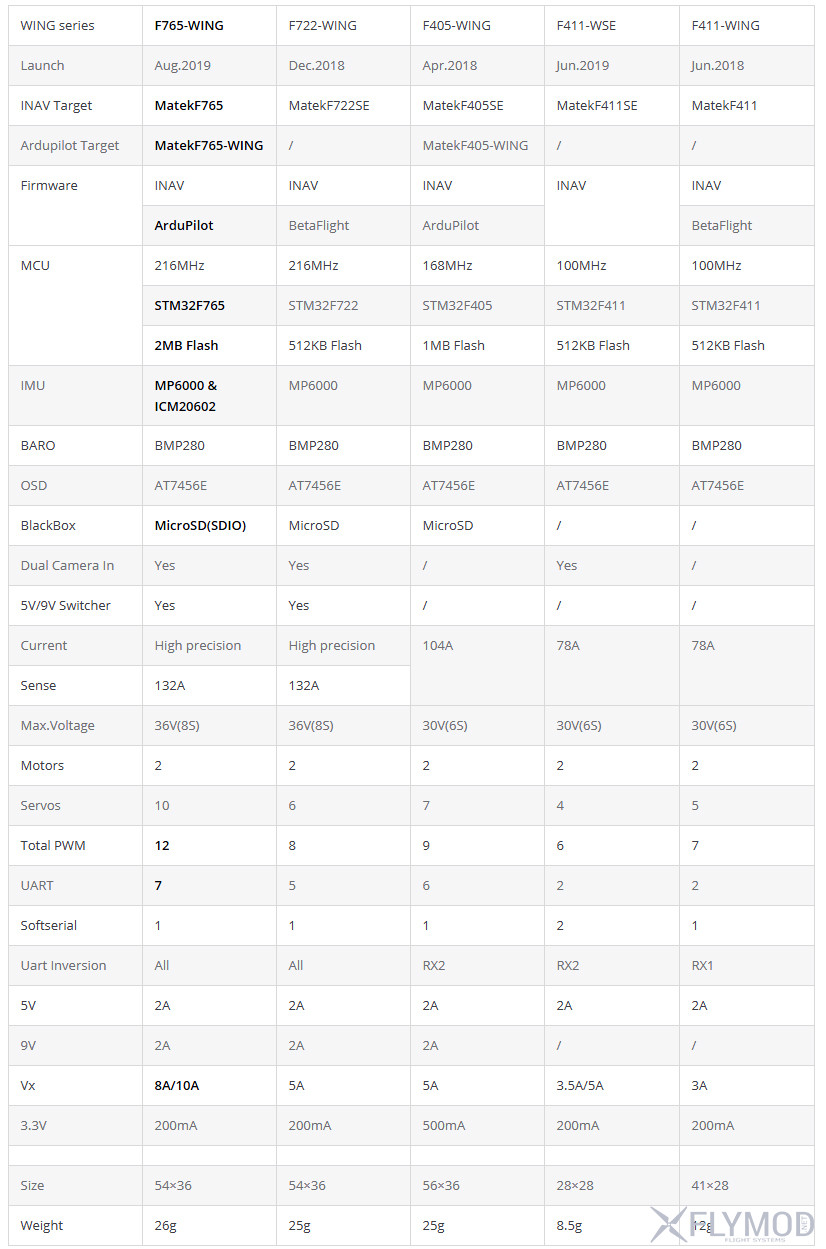
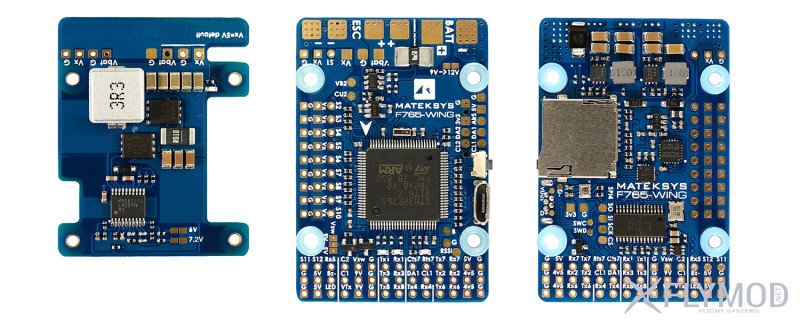
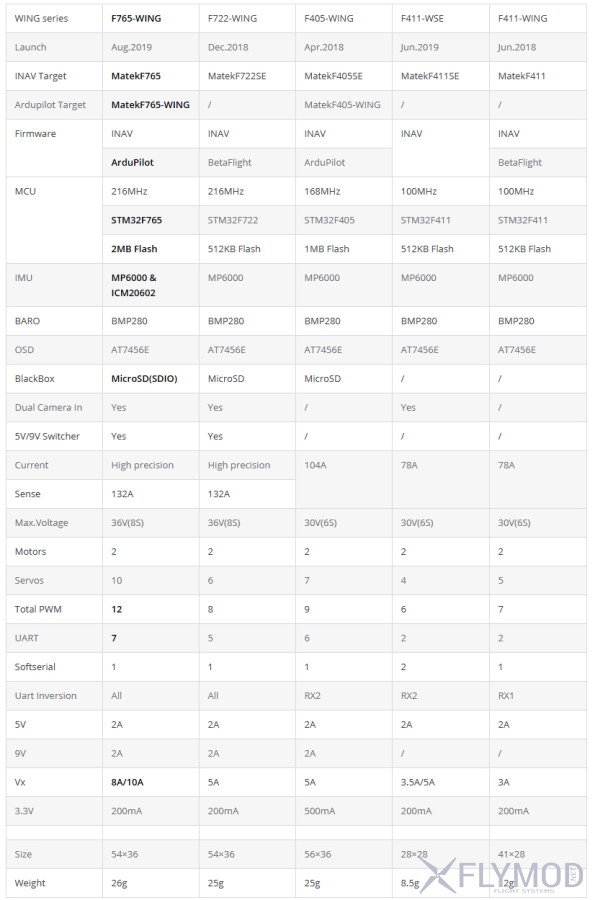
Matek 's F765-WING flight controller has the same dimensions as the previous Matek F722-WING and Matek F405-WING series controllers, but features a powerful STM32F765 processor with 512KB RAM and a choice of two gyroscopes, the MPU6000 or ICM20602.
In addition to combining all the past advantages of the Wing series, Matek have made a number of improvements such as increasing PWM outputs to 12, increasing UART ports to 7, increasing servo outputs to 10, increasing BEC Vx operating current for servos to 8A, and a BlackBox for Micro SD with the new SDIO (Secure Digital Input/Output) standard.
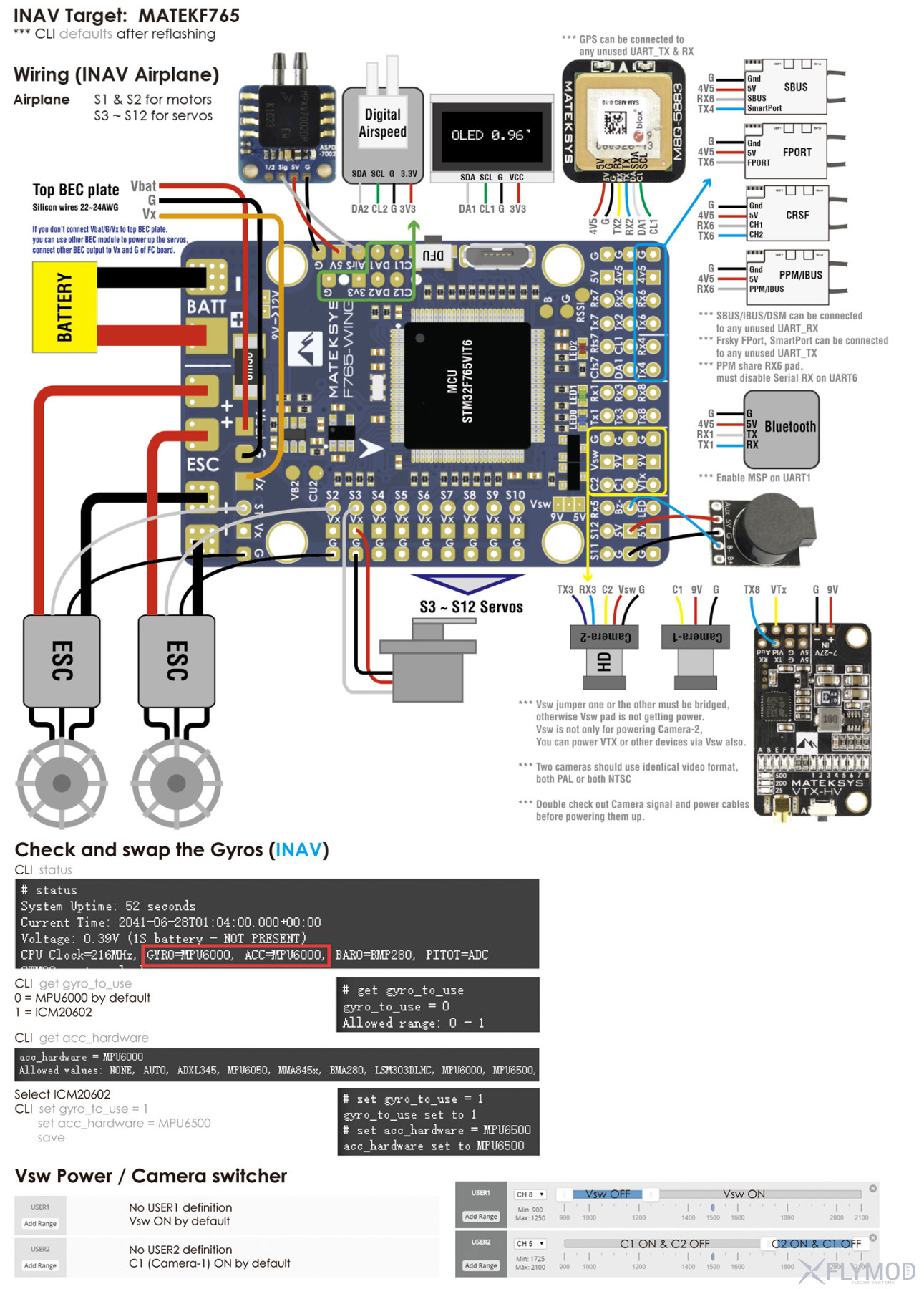
The Matek F765-WING works with iNAV and ArduPilot firmware.
Specifications
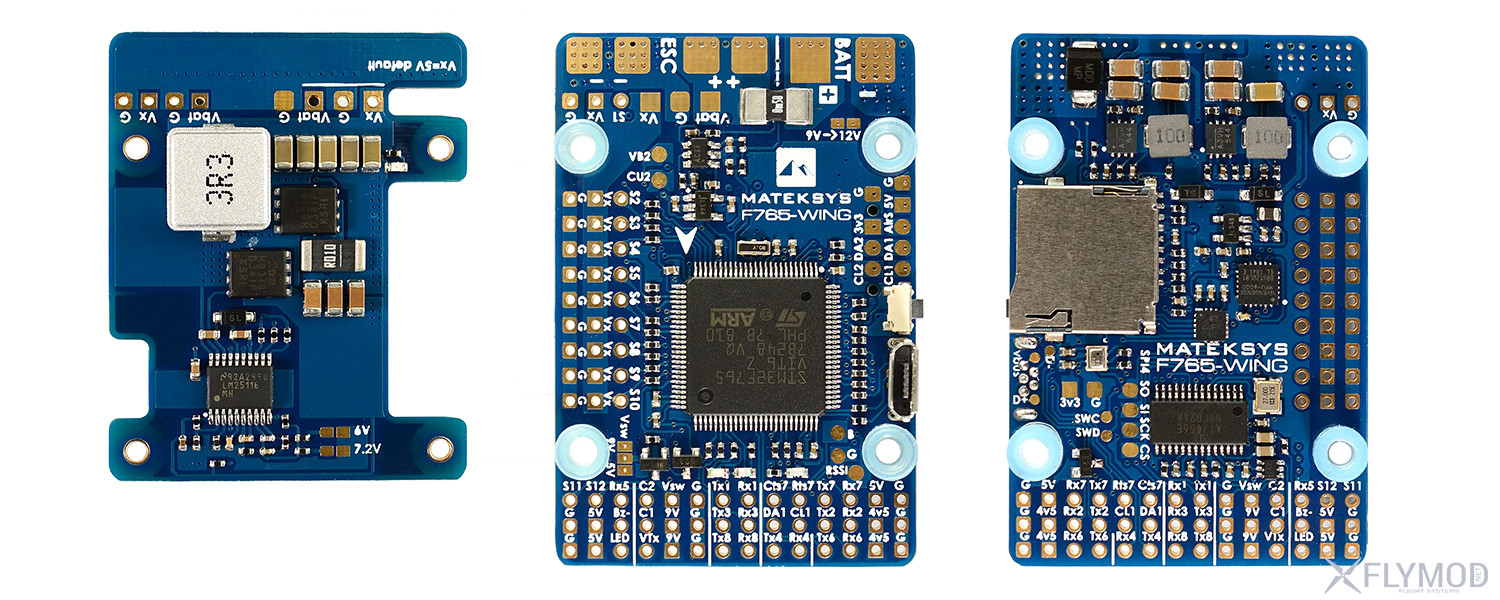
MCU: STM32F765VIT6, 216MHz, 512Kb RAM, 2Mb memory
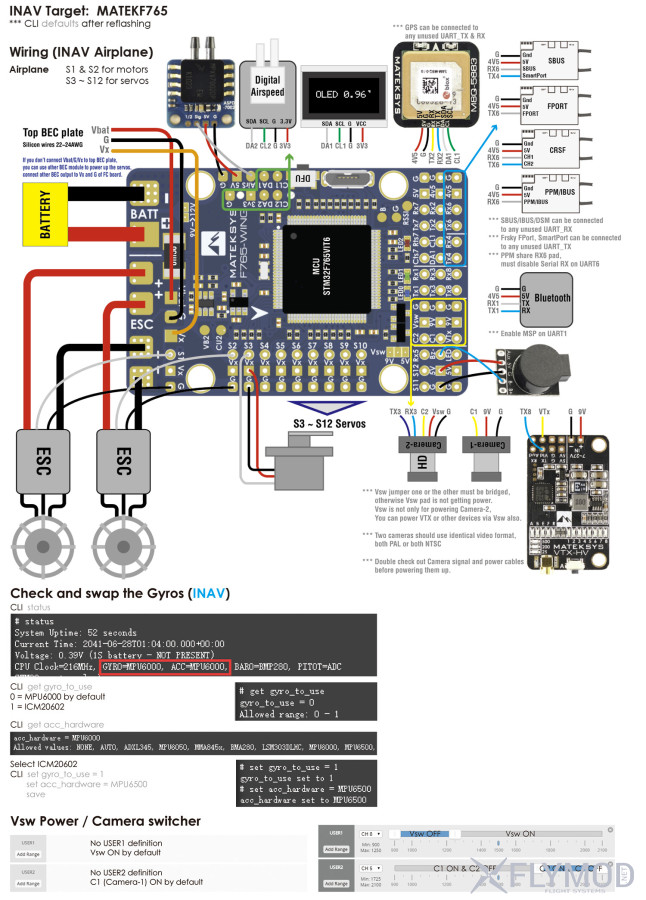
Accelerometer / Gyroscope: MPU6000 (SPI1) and ICM20602 (SPI3)
Barometer: BMP280 (I2C)
OSD: AT7456E (SPI2)
Blackbox: MicroSD card slot (SDIO)
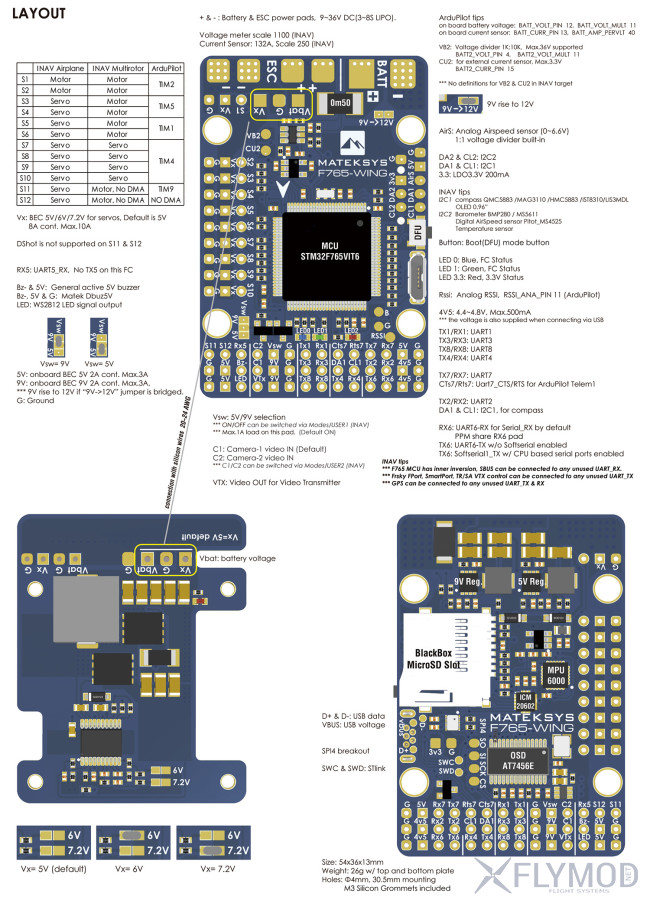
Motor outputs: 2
Servo outputs: 10
UART ports: 7 (1,2,3,4,6,7,8) with built-in inversion
PWM outputs: 12 (S1 ~ S10 with Dshot support)
I2C ports: 2
SPI4 breakout output: 1
Softserial1_Tx port (INAV)
3 x LEDs for FC STATUS (blue, red) and 3.3V BEC indicator (red)
ADC (ADC): VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2
Switchable inputs for dual camera use
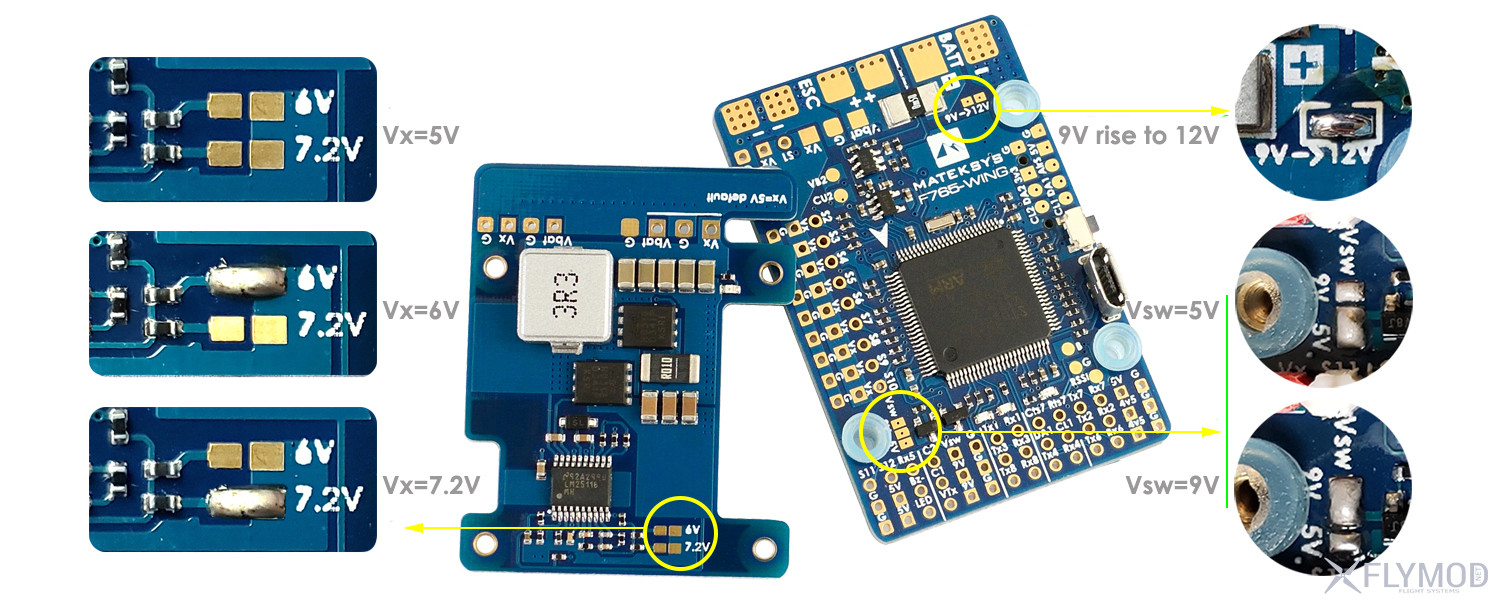
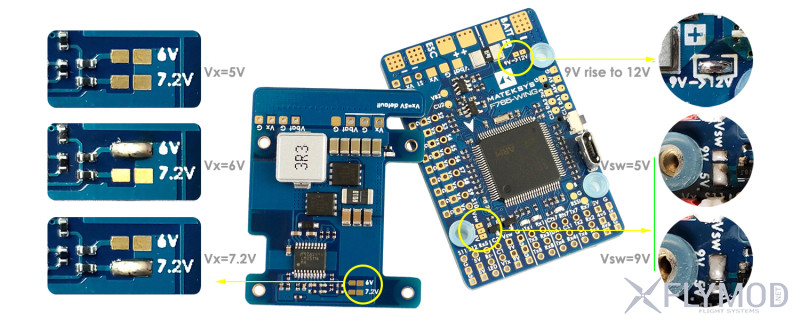
Switchable BEC: 5V / 9V (12V)
High precision current measurement
ADC voltage divider VB2: 1K: 10K
AirSpeed ADC voltage divider: 10K: 10K
Battery Voltage Sensor: 1:10 (scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
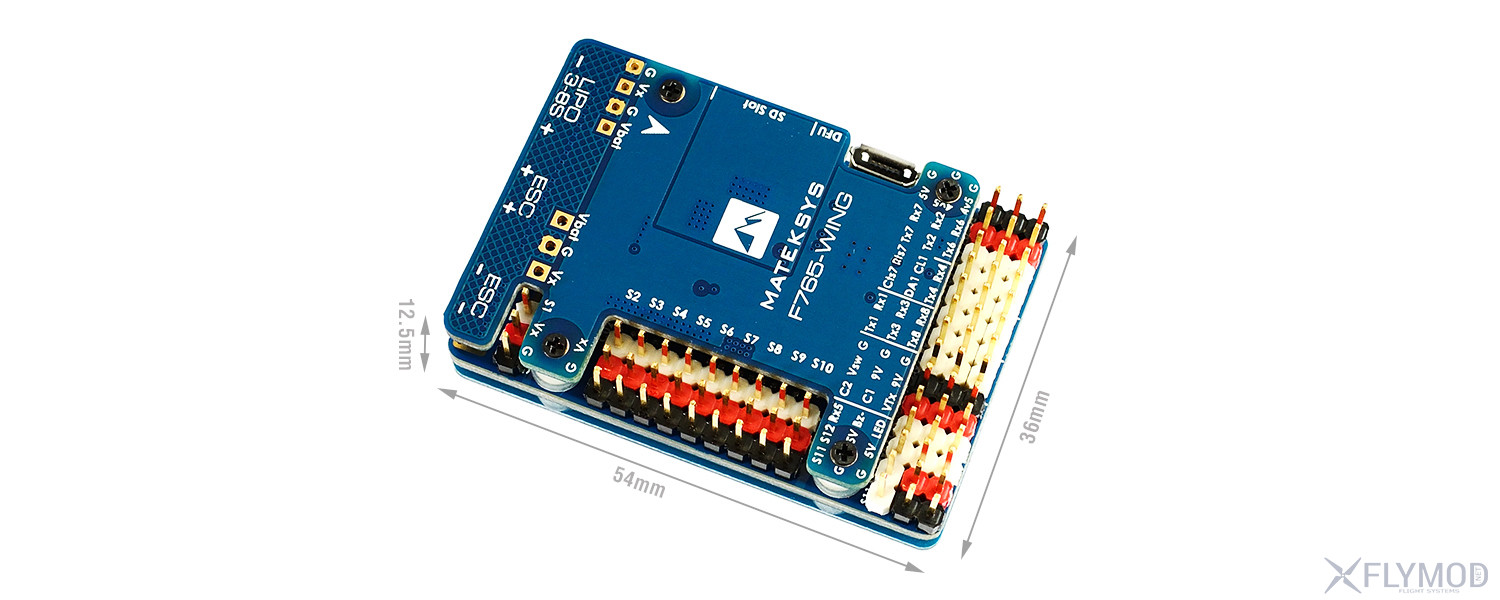
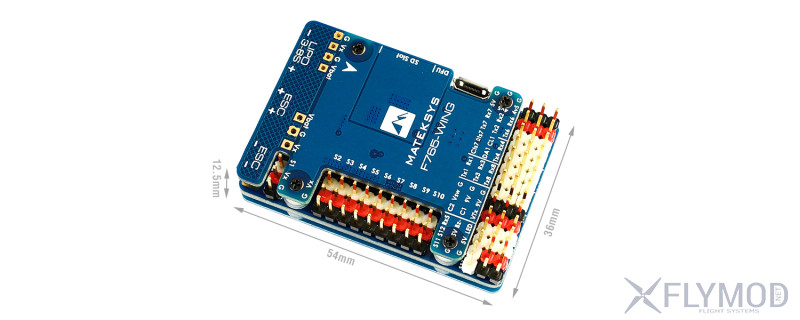
Mounting: 30.5 x 30.5mm, hole diameter 4mm, with 3mm spacers
Dimensions: 54 x 36 x 13mm
Weight: 26g
PDB
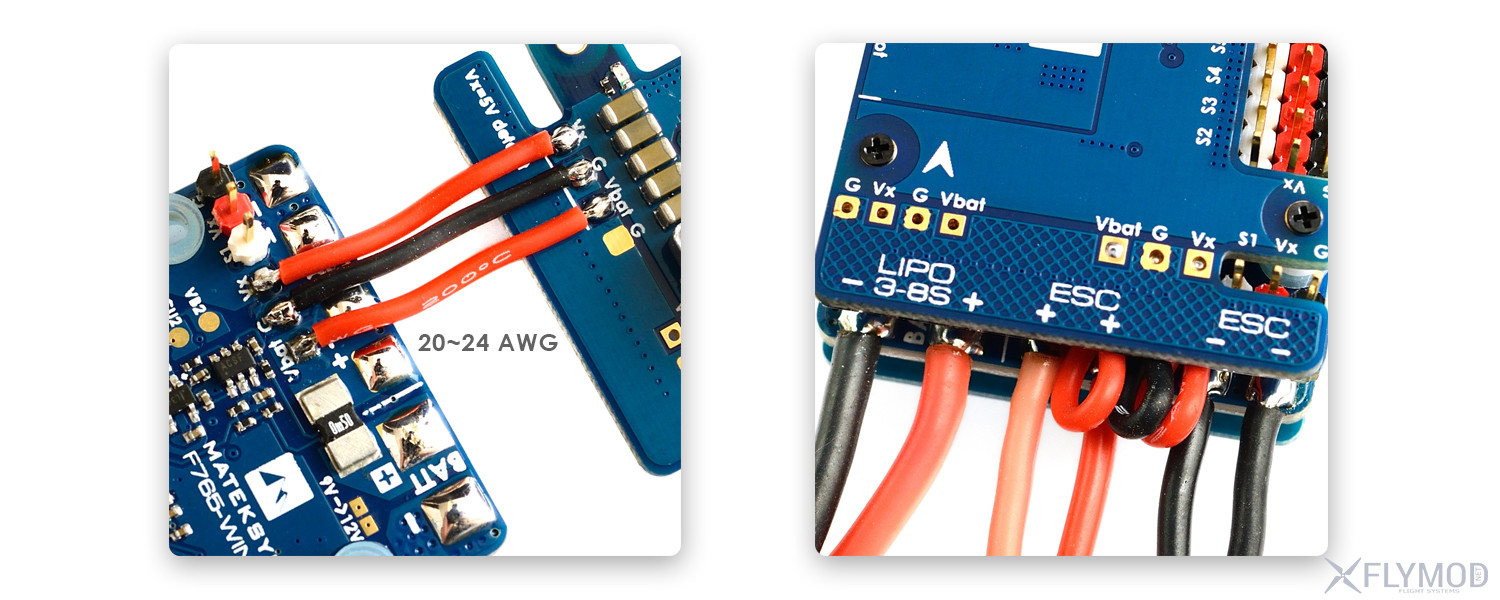
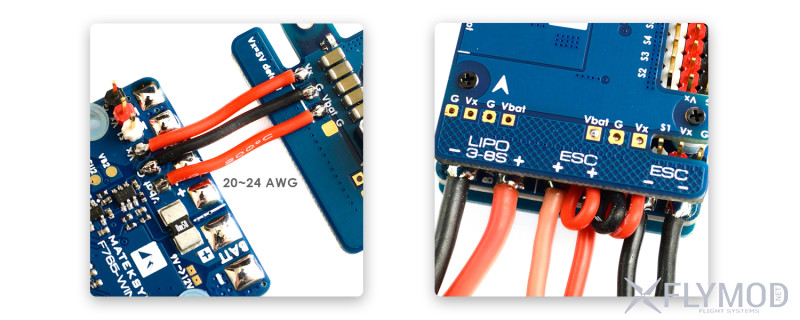
Input Voltage Range: 9 ~ 36V (3 ~ 8S LiPo) with TVS protection
Outputs for ESC: 2
Current sensor: 132A, 3.3V ADC (scale 250 in INAV, 40A/V in ArduPilot)
BEC 5V output
Designed for flight controller, receiver, OSD, FPV camera, buzzer, LED module, GPS module, AirSpeed sensor
Continuous current: 2A (max. 3A)
BEC output 9V / 12V
Designed for video transmitter, FPV camera, LED module
Continuous current: 2A (max. 3A)
12V option with jumper
BEC Vx output
Designed for servos
Adjustable voltage: 5V default, 6V or 7.2V with jumper.
Continuous current: 8A, (max. 10A)
BEC output 3.3V
Designed for Baro / Compass and Spektrum RX module
Linear regulator
Continuous current: 200mA
Recommendations
Camera-1 and Vsw are enabled by default
If 2 cameras are used, both cameras must be set to the same video format, both PAL or both NTSC
Rx5 is not supported yet
Contacts VB2 and CU2 are not used in INAV
If the FC board and the top BEC board are not connected via Vbat / G / Vx, you can solder another BEC output to the FC Vx and G panel to enable the servos
OSD font loading may be interrupted in MacOS INAV configurator, use Windows version






Reviews and discussions
Registration