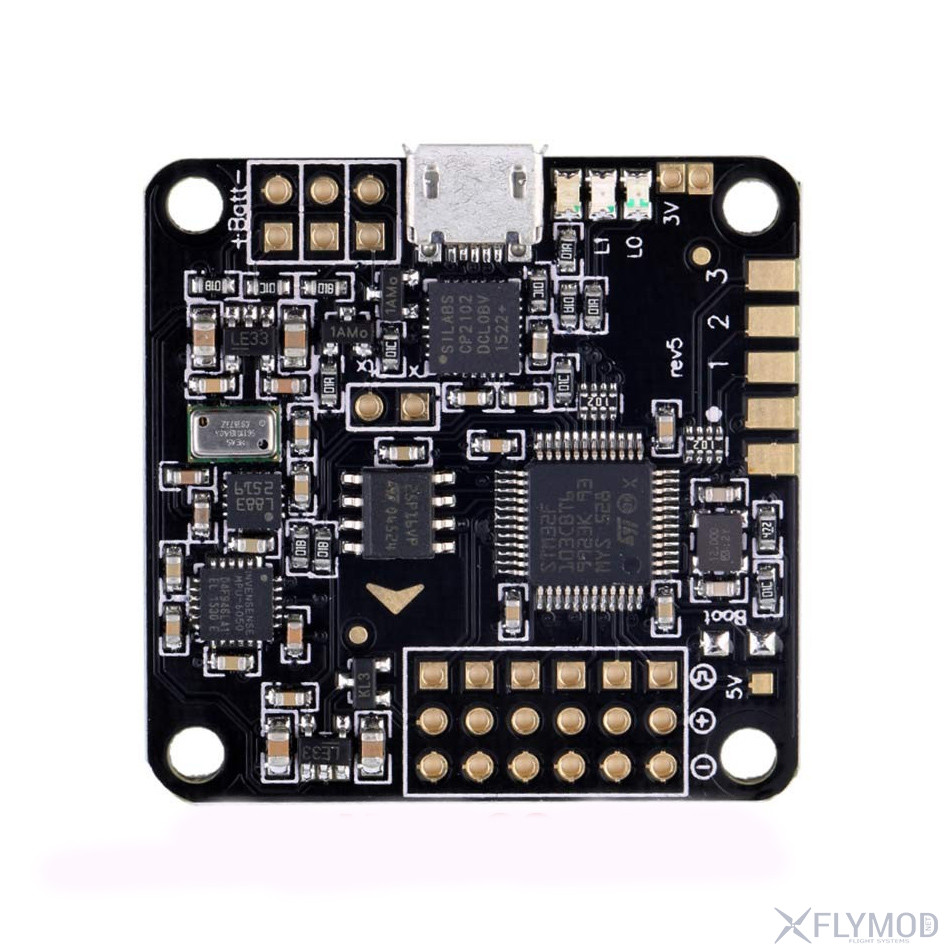
Improved version of the Naze32 10Dof rev5 controller, has a built-in pressure sensor (barometer) for altitude control flights and a compass for Headless mode flights. Works on CleanFlight\BetaFlight firmware.
Features
Modern 32-bit STM32F103C8T6 processor
Built-in voltage sensor (up to 6S)
MS5611 barometer
HMC5883L Compass
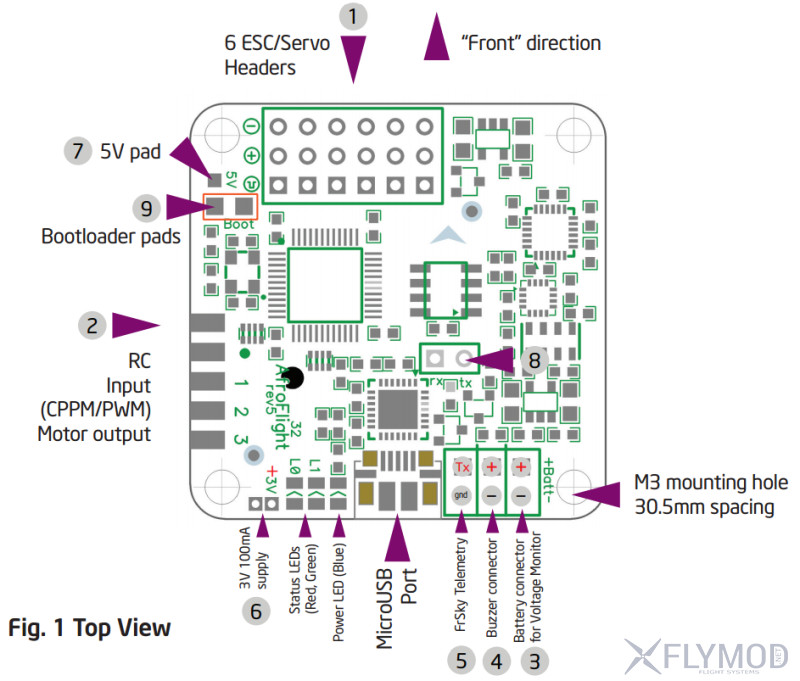
Controller connection and configuration via Micro USB
Telemetry output
Built-in FrSky telemetry output with inverter
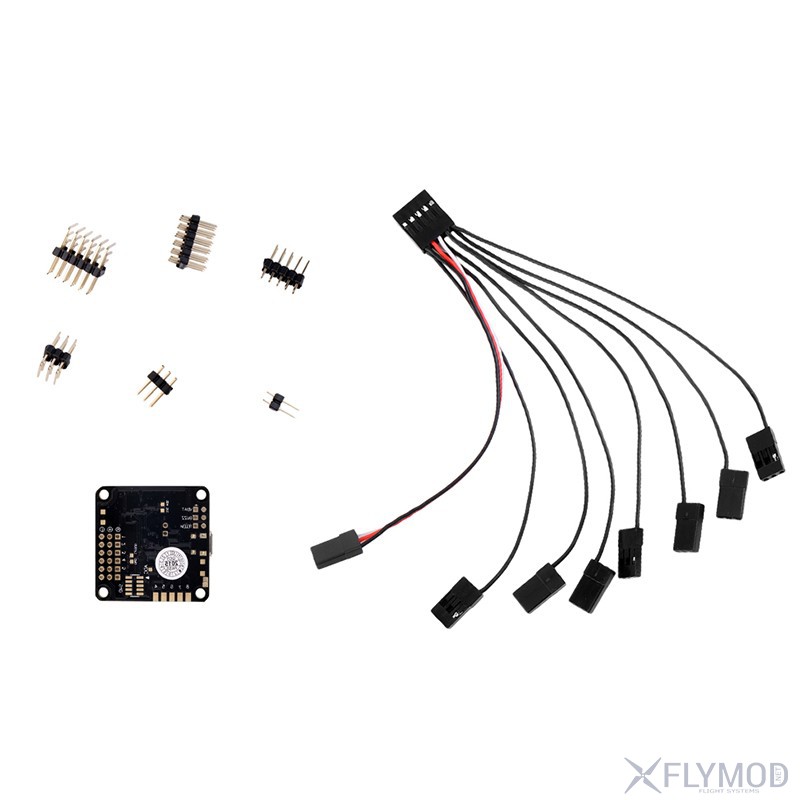
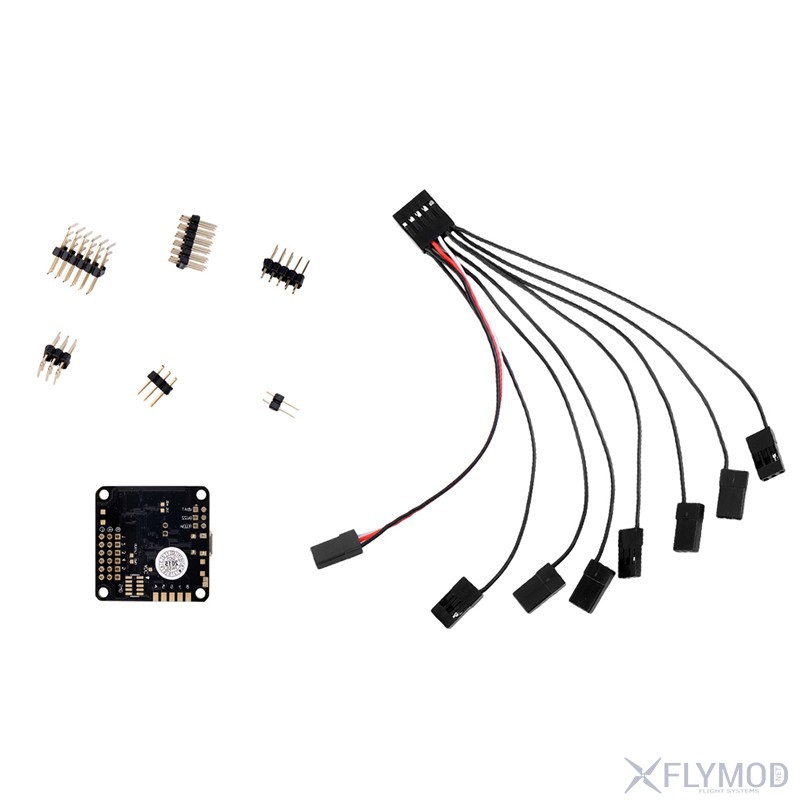
Up to 8 inputs from receiver. Supports PPM connection over one wire (FrSky, etc.).
8 outputs to motors or servos
Choice of different quadcopter frames: Quad/Hexa/Tri/Bi/Y4/Y6/Octo
Very bright indication LEDs
2000 degree/per second 3-axis MEMS gyroscope + accelerometer MPU6050














Reviews and discussions
There are no messages yet. Leave your message first.
Registration