Полетный контроллер Matek H743-WING V3 использует самый современный и производительный процессор H743, работающий с частотой 480MHz и оперативной памятью 1Mb. На плате есть новый порт CAN для поддержки будущих периферийных UAVCAN устройств.
Matek H743-WING работает с прошивками ArduPilot, BetaFlight и iNAV.
Что нового в H743-Wing V3?
Вместо двух гироспокопов MPU6000(V2)+ICM42605 используется новый гироскоп ICM42688-P(V3)+ICM42605
Совместим с новыми версиями прошивок ArduPilot plane 4.2.0+ и INAV 5.0+
PDB/датчик тока перемещен с платы FC на нижнюю пластину
Перемещено 8A BEC с верхней платы на нижнюю с верхней платы
Установлен разъем JST-GH для порта CAN вместо разъема JST-SH
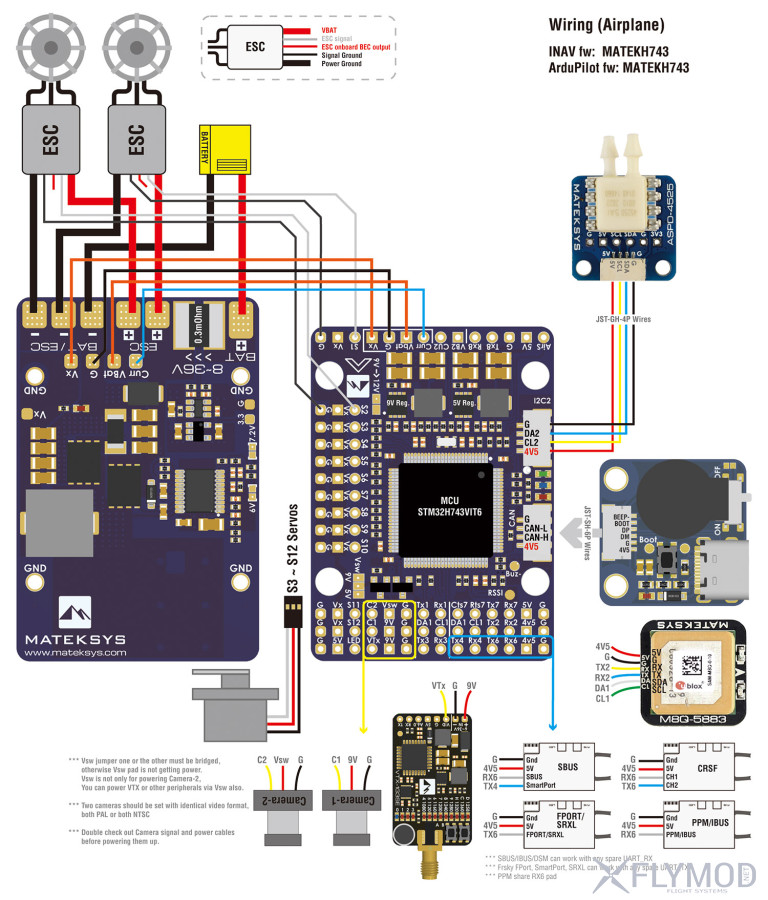
Добавлен разъем JST-GH для I2C2 для подключения по принципу plug and play с датчиком воздушной скорости ASPD-4525
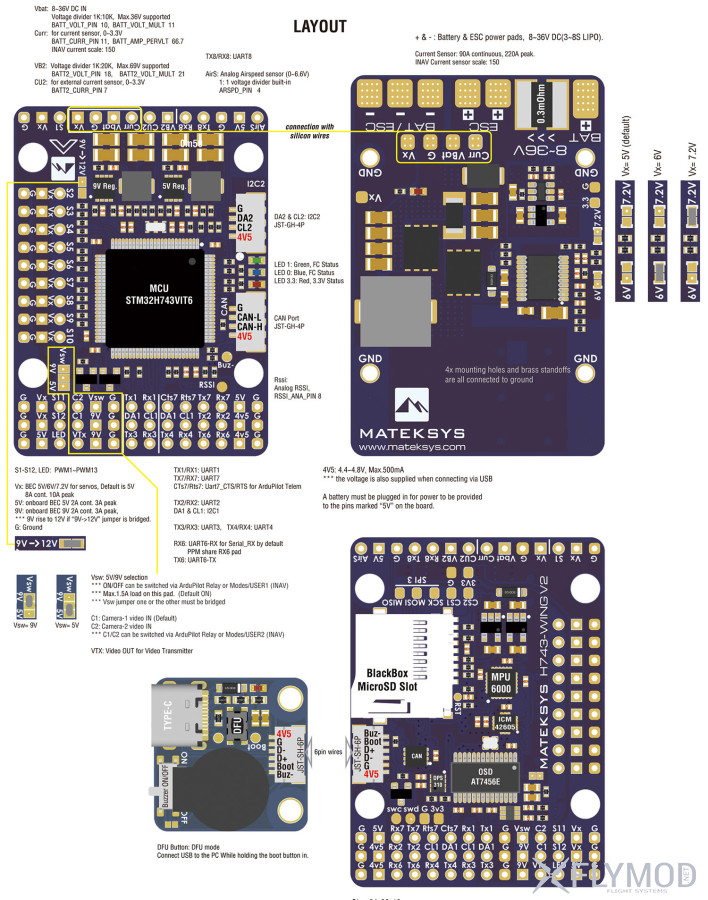
Характеристики
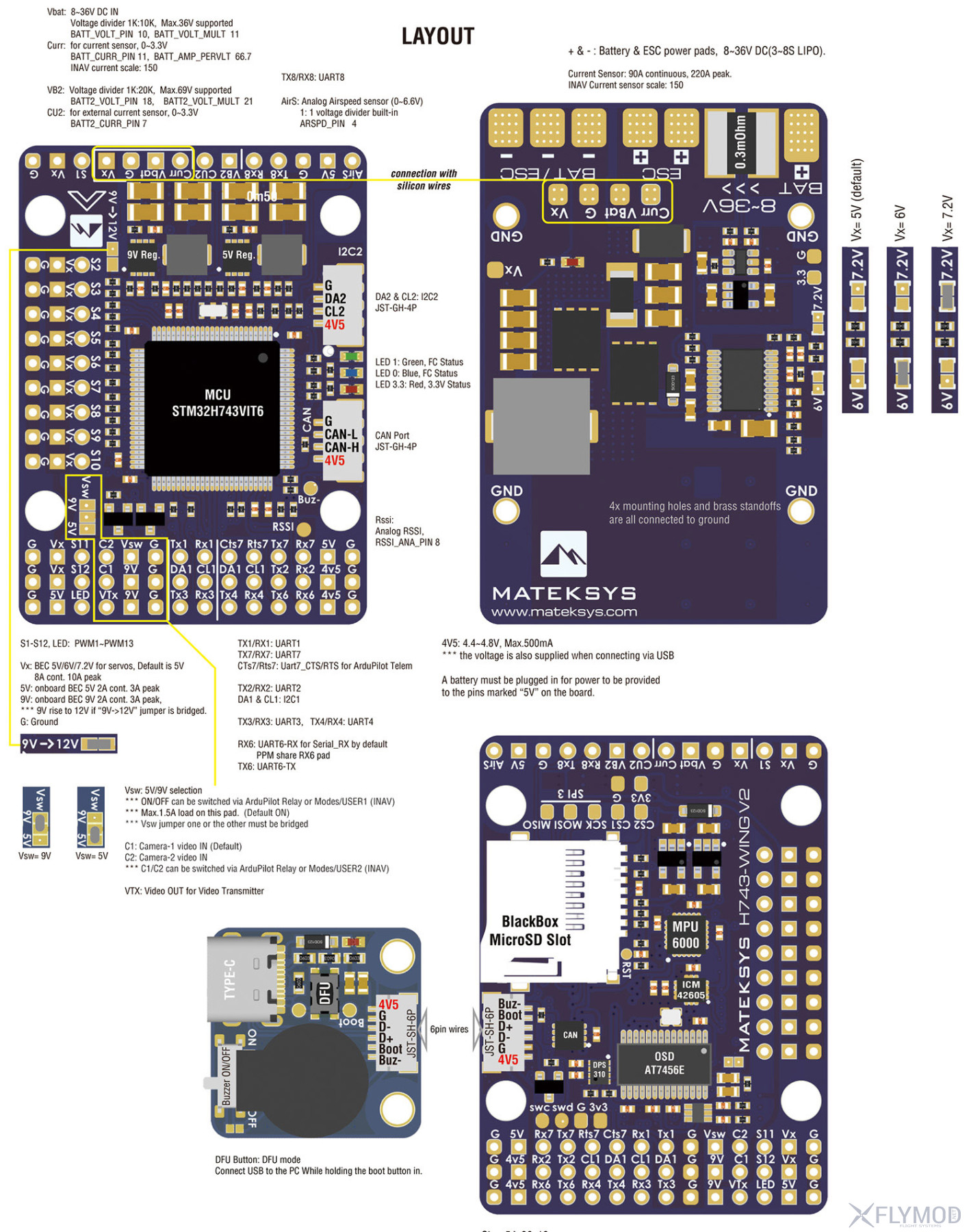
Процессор: STM32H743VIT6, 480MHz, 1Mb ОЗУ, память 2Mb
Акселерометр/гироскоп: ICM42688-P и ICM42605 (SPI4)
Барометр: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: слот для карт MicroSD (SDIO)
UART порты: 7 (1,2,3,4,6,7,8) со встроенной инверсией
PWM выходы: 13 (включая светодиодную площадку)
I2C порты: 2
CAN порт: 1
Выход SPI3 breakout: 1
3 x светодиоды для FC STATUS (синий, красный) и индикатор 3.3V BEC (красный)
ADC (АЦП): VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2
Отдельная плата: USB Type-C / пищалка
Переключаемые входы для использования двух камер
Переключаемый BEC: 5V / 9V (12V)
Датчик тока высокой точности: есть
Делитель напряжения ADC VB2: 1K: 10K
Делитель напряжения ADC AirSpeed: 10K: 10K
Управление INAV TR/SA VTX: есть
Поддержка пищалки: есть
RSSI: есть
Подключение аналогового датчика скорости: есть
Подключение цифрового датчика скорости: есть
Статическая мощность: 160mA при 5V
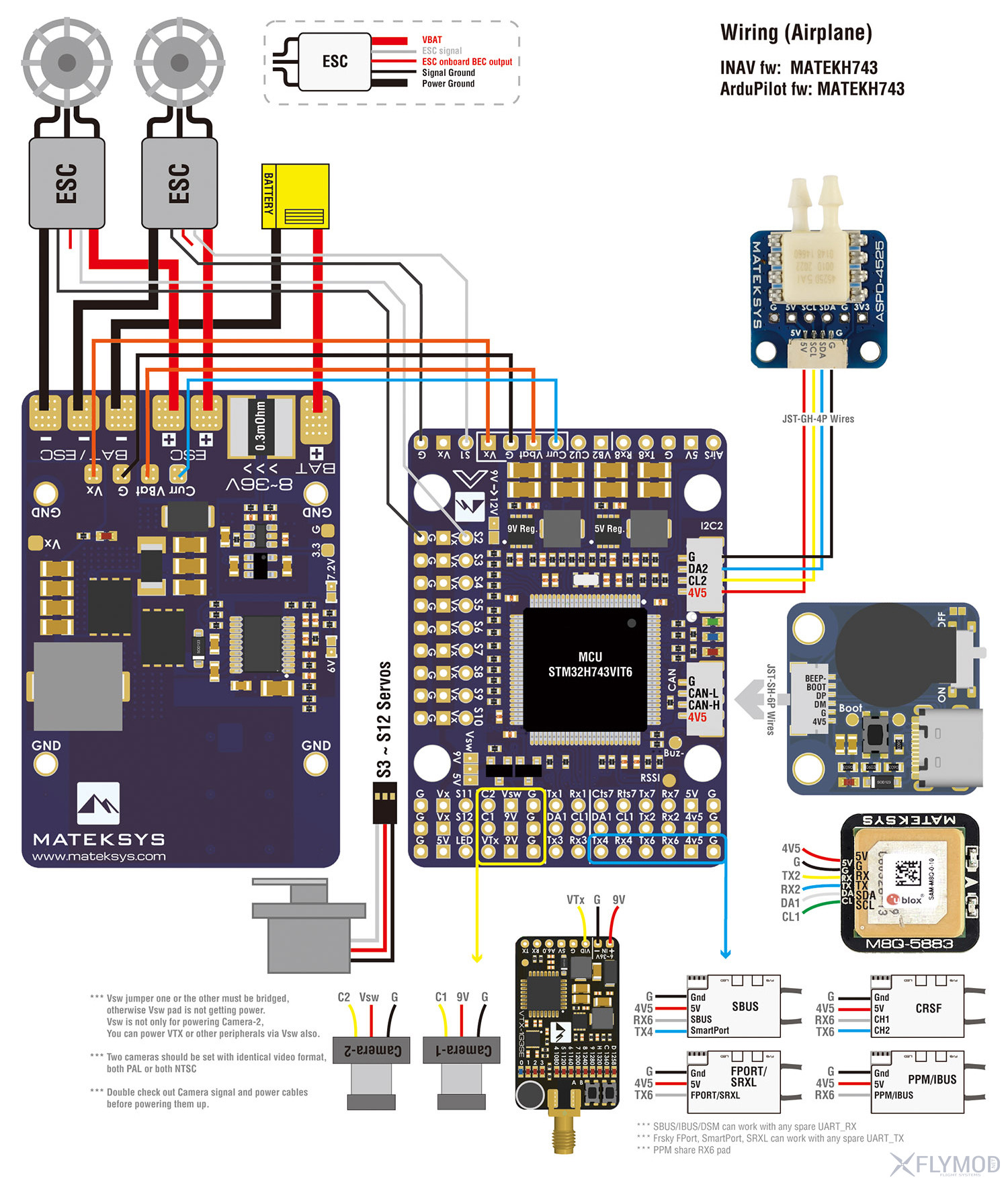
Прошивка INAV: MATEKH743
Прошивка: ArduPilot (ChiBiOS): MATEKH743
Прошивка BetaFlight: MATEKH743
Крепление: 30.5 x 30.5 мм, диаметр отверстий 4 мм, с прокладками 3 мм
Если вы загрузите прошивку ArduPilot на контроллер через конфигуратор INAV / BetaFlight. Известная проблема заключается в том, что процесс загрузки зависает на 50%, если выбрано "full chip erase". Настоятельно рекомендуется использовать STM32CubeProgrammer для удаления MCU и загрузки прошивки. Официальная инструкция от Matek
Поддержка Crossfire существует только в "последней" версии 4.1, а не в версии 4.0.x, если вы загружаете "последнюю" версию 4.1, установите SERIAL7_PROTOCOL = 23, RSSI_TYPE = 3.
Комплектация
1 х контроллер полета Matek H743-WING
1 x адаптер USB (Type-C) / пищалка (активный)
1 x кабель JST SH-4P - GH-4P для порта CAN, 20см
1 x кабель SH-6P - SH-6P для USB адаптера, 20см
1 x набор штыревых разъемов dupont 2.54 (разъемы не припаяны к плате)
skybos, в aspd-dlvr используется новый датчик DLVR-L10D и есть два интерфейса: стандартный I2C и новый CAN, который пытается внедрить Matek на всех своих новых контроллерах на крыльях.








Отзывы и обсуждения
Регистрация