GPS модуль Matek M10Q-5883 использует GNSS на базе оригинального чипа u-bloxSAM-M10Q-00B с поддержкой одновременного приема четырех GNSS (GPS, ГЛОНАСС, Galileo и BeiDou). Обеспечивает отличную чувствительность и время сбора данных для всех сигналов GNSS L1. Благодаря встроенной GNSS RHCP патч антенне с высоким коэффициентом усиления достигается наилучший баланс между производительностью и компактными размерами. Более подробную информацию о SAM-M10Q можно посмотреть на странице u-blox SAM-M10Q.
Особенности
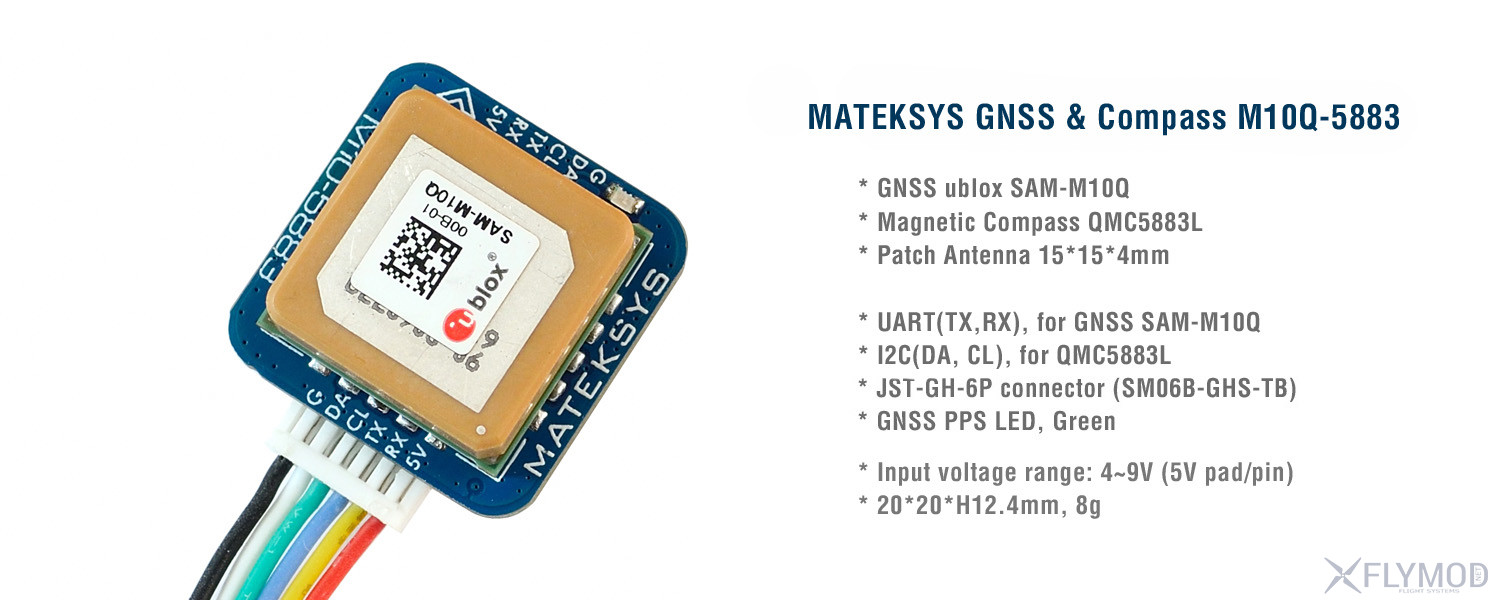
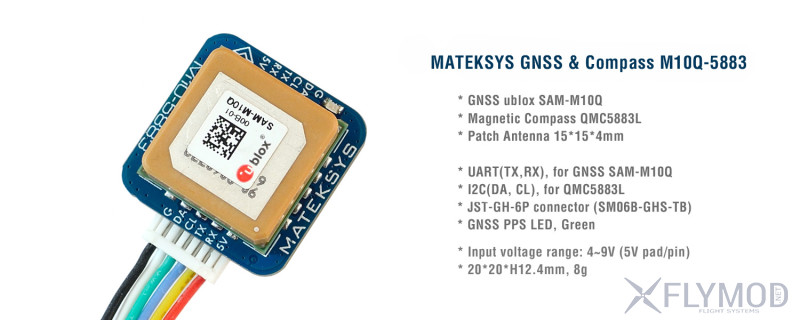
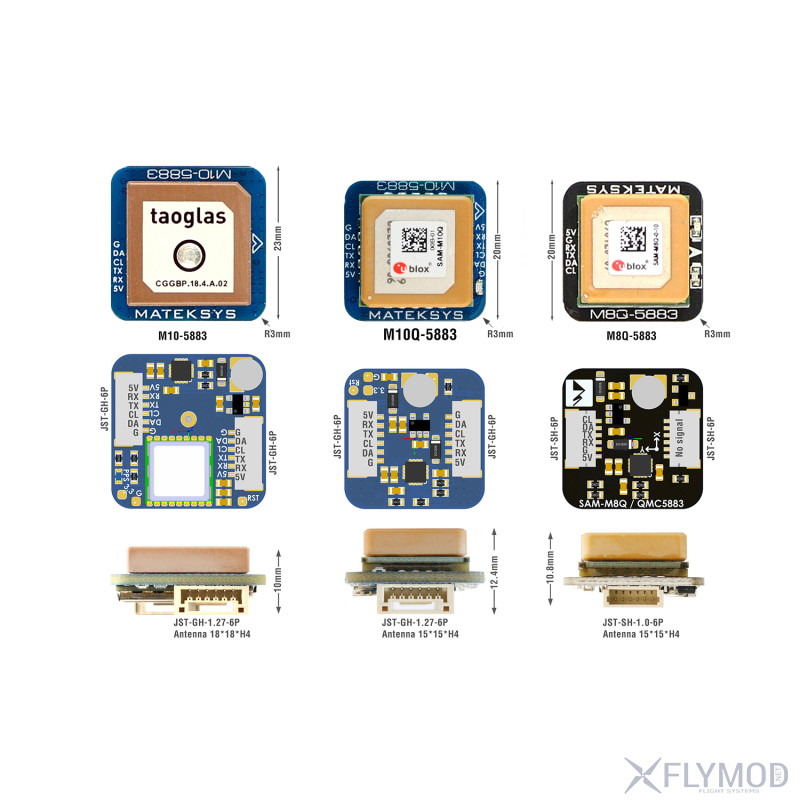
Оригинальный чип GNSS u-blox SAM-M10Q-00B с поддержкой GPS, GLONASS, Galileo и BeiDou
Компас QMC5883L
Патч-антенна 15*15*4мм с высоким коэффициентом усиления
Характеристики
GNSS u-blox SAM-M10Q-00B (GPS, GLONASS, Galileo and BeiDou)
Компас QMC5883L
Патч-антенна 15*15*4мм
Диапазон входного напряжения: 4~9V (5V pad/pin)
Потребляемая мощность: 13 мА
Скорость передачи данных: 9600 бит/сек (по умолчанию)
Диапазон рабочих температур: -20~80 °C
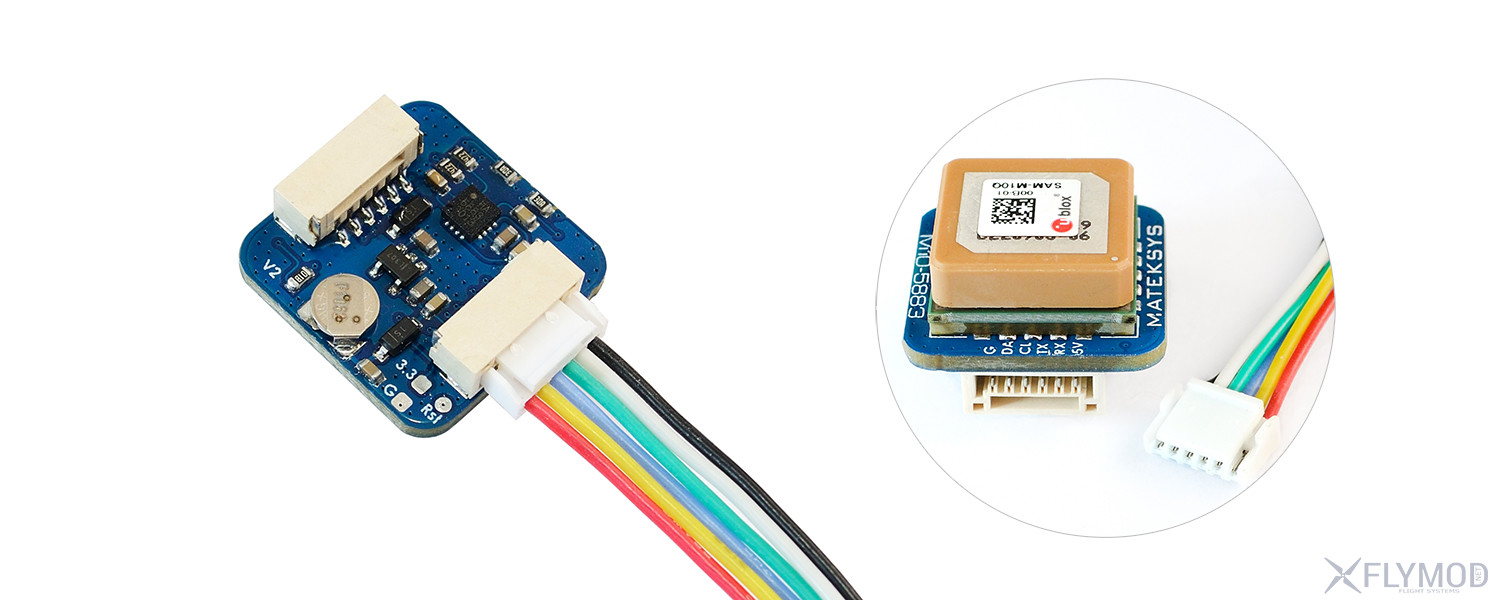
Интерфейс: UART(TX, RX) для GNSS SAM-M10Q-00B
Интерфейс: I2C(DA, CL) для Compass QMC5883L
Коннектор JST-GH-6P (SM06B-GHS-TB) с шагом 1.27мм
Светодиод GNSS PPS: зеленый
Непрерывно горит после включения питания
Мигает (1 Гц), когда GNSS получает 3D-фиксирование
Протокол: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO or NMEA 1Hz
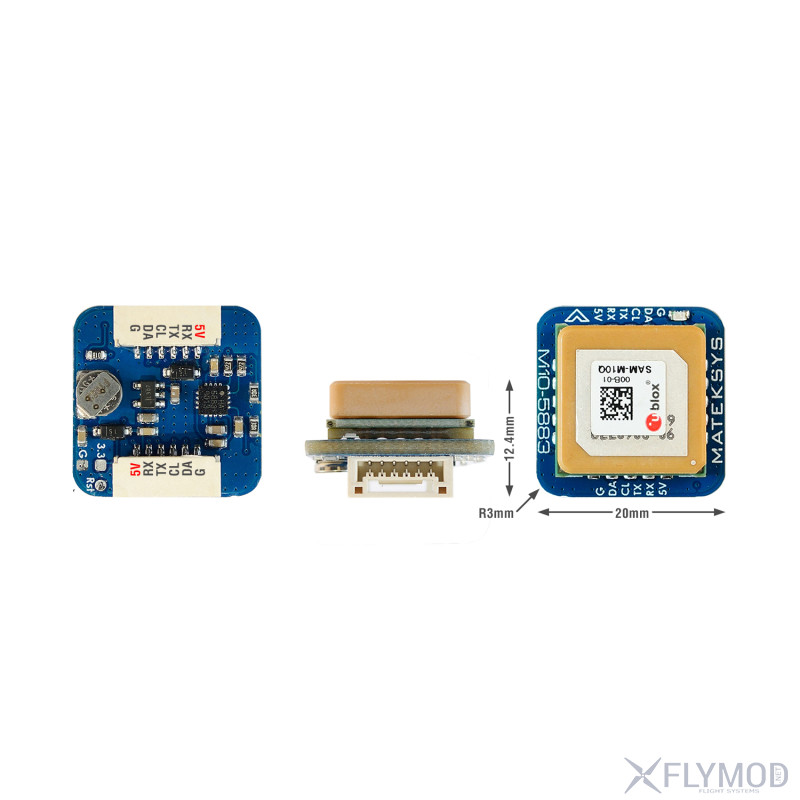
Размеры: 20мм*20мм*12.4мм
Вес: 8г
Комплектация
1x модуль M10Q-5883
1x переходник с JST-GH-6P на JST-GH-6P 20см
Подключение и настройка
M10Q-5883 5V к Flight controller 4~9V
M10Q-5883 RX к Flight controller UART_TX
M10Q-5883 TX к Flight controller UART_RX
M10Q-5883 CL к Flight controller I2C_SCL
M10Q-5883 DA к Flight controller I2C_SDA
M10Q-5883 G к Flight controller GND
Примечания
Калибровка компаса (в горизонтальном положении): настоятельно не рекомендуется наклонять компас!
INAV/BetaFLight: стрелка компаса направлена вперед, установите угол 270° по часовой стрелке, когда стрелка полетного контроллера направлена вперед.
INAV/BetaFLight: стрелка компаса направлена назад, установите угол 90° по часовой стрелке, когда стрелка полетного контроллера направлена вперед.
Ardupilot/Mission Planner: Ротация "None"
Убедитесь, что компас/магнитометр находится на расстоянии 10 см от силовых линий /регуляторов/моторов/материалов на основе железа.
Требуются следующие версии прошивок: INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 или новее.
Серии UBlox NEO-M9N, MAX-M10S, SAM-M10Q не имеют встроенной флэш-памяти данных. Когда отключается питание GNSS, а суперконденсатор разряжается, то настройки вернутся к значениям по умолчанию.
Протокол UBX является двунаправленным. Прошивка полетного контроллера может изменять настройки GPS по протоколу UBX. Вам не нужно задавать параметры модуля GNSS в u-center.
Конфигурация по умолчанию на SAM-M10Q с ublox FW 5.1 — одновременный прием GPS, Galileo, ГЛОНАСС и BeiDou B1C с включенными QZSS и SBAS.
M10Q-5883 обеспечивает возможность сброса приемника. Замыкание контактной площадки «RST» на землю не менее чем на 100 мс вызывает холодный пуск. СБРОС удалит всю информацию и вызовет холодный запуск. Его следует использовать только как вариант восстановления. Если вы уверены, что проводка и настройки в порядке, но контроллер полета не может обнаружить модуль GNSS (серый значок GPS), попробуйте выполнить сброс.
Царапины на керамической антенне – результат настройки антенны.













Отзывы и обсуждения
Регистрация