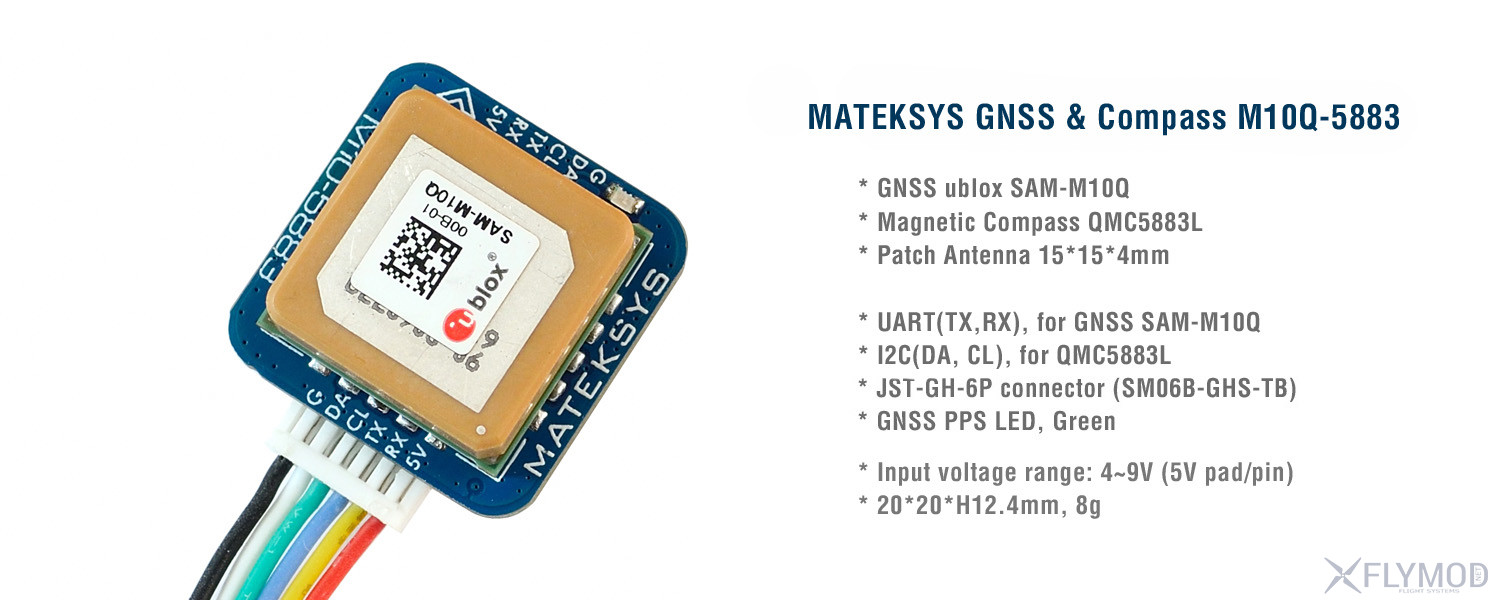
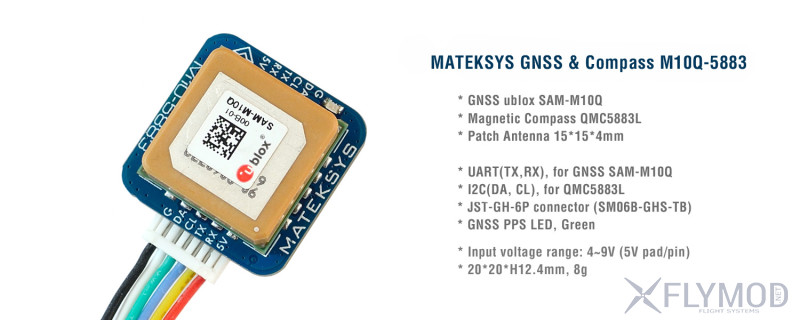
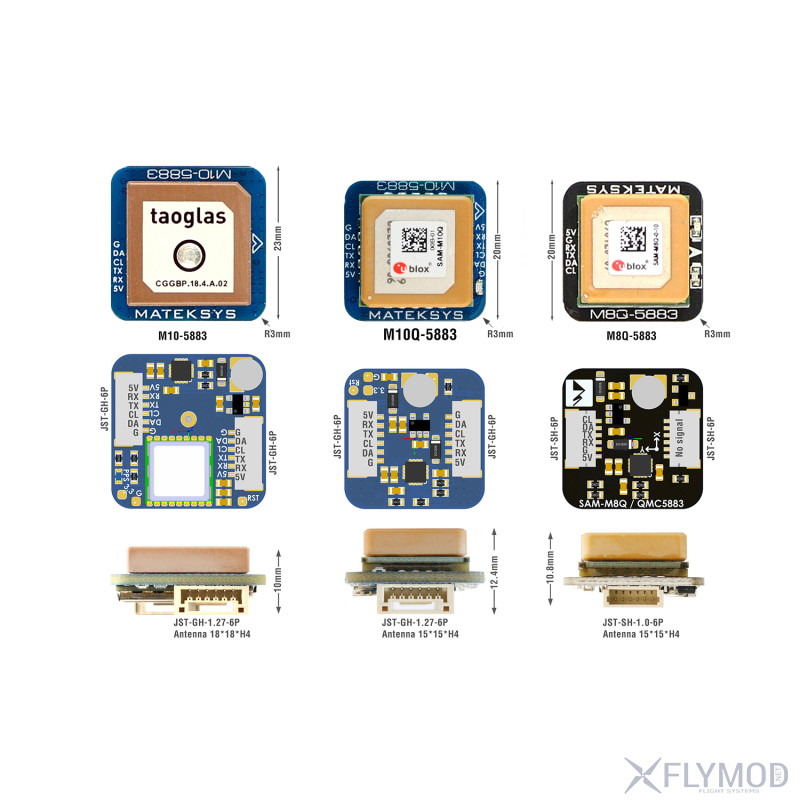
GPS модуль Matek M10Q-5883 використовує GNSS на базі оригінального чипа u-bloxSAM-M10Q-00B з підтримкою одночасного приймання чотирьох GNSS (GPS, ГЛОНАСС, Galileo і BeiDou). Забезпечує відмінну чутливість і час збору даних для всіх сигналів GNSS L1. Завдяки вбудованій GNSS RHCP патч-антені з високим коефіцієнтом посилення досягається найкращий баланс між продуктивністю і компактними розмірами. Більш детальну інформацію про SAM-M10Q можна подивитися на сторінці u-blox SAM-M10Q.
Особливості
Оригінальний чип GNSS u-blox SAM-M10Q-00B з підтримкою GPS, GLONASS, Galileo і BeiDou
Компас QMC5883L
Патч-антена 15*15*4мм з високим коефіцієнтом посилення
Характеристики
GNSS u-blox SAM-M10Q-00B (GPS, GLONASS, Galileo and BeiDou)
Компас QMC5883L
Патч-антена 15*15*4мм
Діапазон вхідної напруги: 4~9V (5V pad/pin)
Споживана потужність: 13 мА
Швидкість передачі даних: 9600 біт/сек (за замовчуванням)
Діапазон робочих температур: -20~80 °C
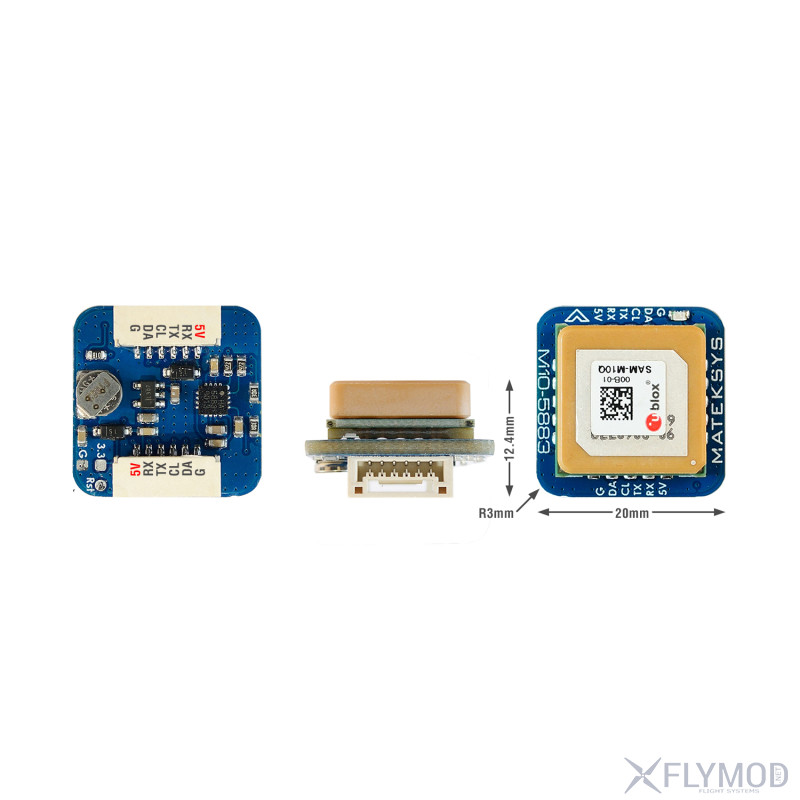
Інтерфейс: UART(TX, RX) для GNSS SAM-M10Q-00B
Інтерфейс: I2C(DA, CL) для Compass QMC5883L
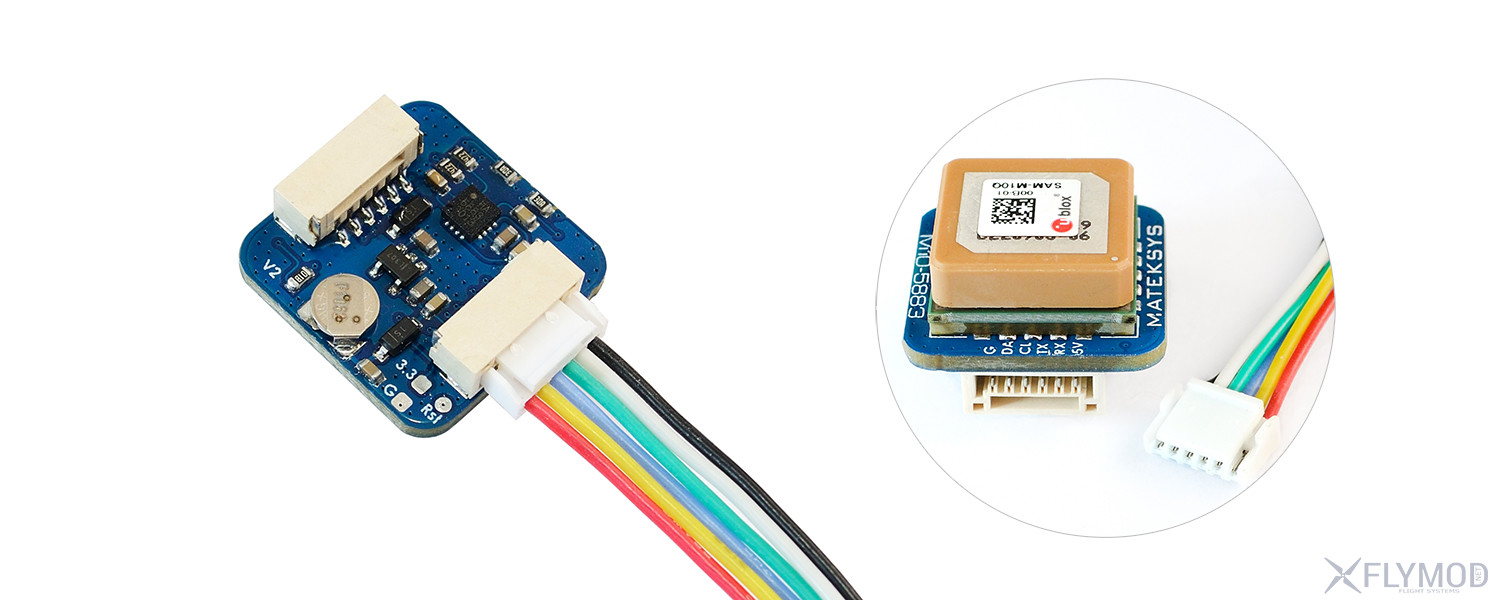
Конектор JST-GH-6P (SM06B-GHS-TB) з кроком 1.27мм
Світлодіод GNSS PPS: зелений
Безперервно горить після ввімкнення живлення
Блимає (1 Гц), коли GNSS отримує 3D-фіксування
Протокол: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO or NMEA 1Hz
Розміри: 20мм*20мм*12.4мм
Вага: 8г
Комплектація
1x модуль M10Q-5883
1x перехідник з JST-GH-6P на JST-GH-6P 20см
Підключення та налаштування
M10Q-5883 5V до Flight controller 4~9V
M10Q-5883 RX до Flight controller UART_TX
M10Q-5883 TX до Flight controller UART_RX
M10Q-5883 CL до Flight controller I2C_SCL
M10Q-5883 DA до Flight controller I2C_SDA
M10Q-5883 G до Flight controller GND
Примітки
Калібрування компаса (в горизонтальному положенні): настійно не рекомендується нахиляти компас!
INAV/BetaFLight: стрілка компаса спрямована вперед, встановіть кут 270° за годинниковою стрілкою, коли стрілка польотного контролера спрямована вперед.
INAV/BetaFLight: стрілка компаса спрямована назад, встановіть кут 90° за годинниковою стрілкою, коли стрілка польотного контролера спрямована вперед.
Ardupilot/Mission Planner: Ротація "None"
Переконайтеся, що компас/магнітометр перебуває на відстані 10 см від силових ліній /регуляторів/моторів/матеріалів на основі заліза.
Потрібні такі версії прошивок: INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 або новіше.
Серії UBlox NEO-M9N, MAX-M10S, SAM-M10Q не мають вбудованої флеш-пам'яті даних. Коли вимикається живлення GNSS, а суперконденсатор розряджається, то налаштування повернуться до значень за замовчуванням.
Протокол UBX є двонаправленим. Прошивка польотного контролера може змінювати налаштування GPS за протоколом UBX. Вам не потрібно задавати параметри модуля GNSS в u-center.
Конфігурація за замовчуванням на SAM-M10Q з ublox FW 5.1 - одночасне приймання GPS, Galileo, ГЛОНАСС і BeiDou B1C з увімкненими QZSS і SBAS.
M10Q-5883 забезпечує можливість скидання приймача. Замикання контактної площадки "RST" на землю не менше ніж на 100 мс викликає холодний пуск. СБРОС видалить усю інформацію і викличе холодний запуск. Його слід використовувати тільки як варіант відновлення. Якщо ви впевнені, що проводка і налаштування в порядку, але контролер польоту не може виявити модуль GNSS (сірий значок GPS), спробуйте виконати скидання.
Подряпини на керамічній антені - результат налаштування антени.
Усунення неполадок, пов'язаних із GPS: за посиланням













Огляди та обговорення
Реєстрація