- Мій кошик
- Ціни в: USD
Показати ціни в:
- Курс $: 45.4грн
- UA RU EN
Забули свій пароль?
Авторизація за допомогоюGoogle





Авторизація за допомогоюGoogle
Показати ціни в:

Чудова новина для всіх власників радіоапаратури FrSky Taranis - наразі триває розробка технології передавання даних, яка має назву MSP over S.Port або S.PORT / MSP bridge, що, по суті, є двостороннім каналом зв'язку між пультом і контролером польоту, використовуючи технології SBUS і Smart Port. Це, своєю чергою, відкриває нам низку нових можливостей з налаштування різного обладнання на борту FPV дрона, як-от налаштування PID значень на BetaFlight контролері або керування передавачем TBS Unify, де можна буде швидко та віддалено за допомогою радіо вибрати канал і потужність передавача.
У цій статті ми розглянемо налаштування PID у BetaFlight прошивці через Taranis. Тепер вам не потрібно буде більше під'єднувати USB-кабель до контролера, щоб змінити кілька значень ПІД, для цього тепер достатньо зайти в скрипт на Таранісі та ввести нові параметри, зміни будуть встановлені "по повітрю".
Увага! Ці версії програмного забезпечення перебувають ще в процесі тестування і не є офіційними паблік релізами, користувачеві необхідно розуміти, що, можливо, деякі функції можуть працювати некоректно.
Для того щоб скрипти Lua працювали коректно, вам необхідно оновити свій Taranis до останніх версій OpenTX 2.2.X. У цій версії істотно розширили можливості для запуску подібних скриптів, для того щоб вони могли працювати з MSP over S.Port і відправляти зворотні дані.
Ви можете оновити OpenTX стандартним способом через встановлення на комп'ютер OpenTX Companion з офіційного сайту (для роботи Lua скриптів потрібно вибрати в налаштуваннях Companion опцію lua).
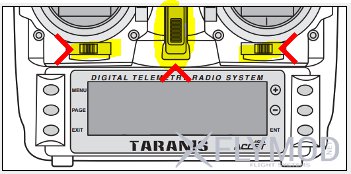
Або можна завантажити файли готових прошивок, закинути їх на SD-карту тараніса в папку FIRMWARES та активувати установлення через BootLoad режим, увімкнувши пульт керування як на зображенні нижче.
Далі необхідно завантажити сам скрипт Lua для перегляду та встановлення ПІД значень.
Його необхідно розмістити на SD карті в папці /SCRIPTS/TELEMETRY/. Зверніть увагу, що ім'я файлу скрипта не повинно перевищувати 6 символів латиницею.
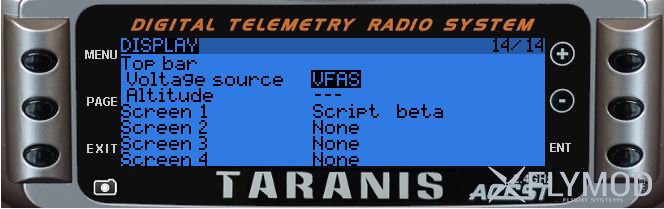
Тепер скопійований скрипт потрібно виставити в 14/14 меню керування моделі в одному з телеметрійних екранів (Screen1\2\3\4) як показано нижче.
Наразі прошивка BetaFlight 3.1 перебуває у статусі розроблення та налагодження, тому вам необхідно завантажити "нічну" версію прошивки за посиланням:
http://andwho.sytes.net:8080/job/BorisB_BetaFlight/lastBuild/
У ZIP архіві ви знайдете hex прошивки для всіх основних польотних контролерів. Завантажується вони звичайним методом через BetaFlight конфігуратор шляхом вибору прошивки на локальному диску.
Без увімкнених портів і телеметрії звісно нічого працювати не буде. Але тут, в принципі, все стандартно і якщо у вас вже є налаштований ПК з SBUS і телеметрією через S. Port, то нічого налаштовувати додатково не потрібно.
У кладці конфігурації необхідно активувати опцію TELEMETRY.
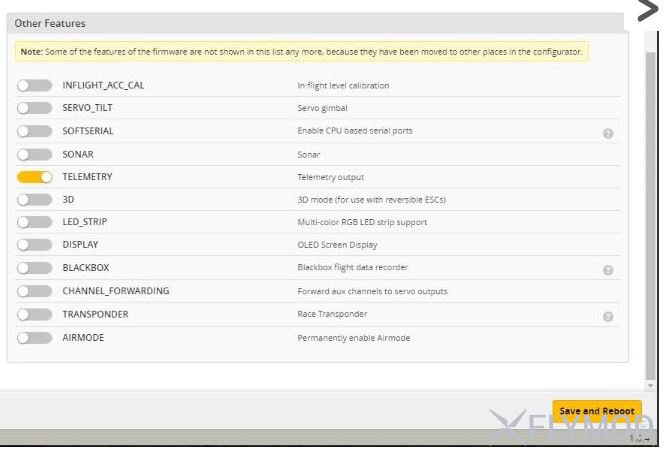
У портах необхідно вмикати порт для SBUS, який зазвичай на F3 контролерах розташовується на UART 3 (потрібно активувати Serial RX). А також на UART 2 потрібно вибрати телеметрію Smart Port.

Для запуску скрипта в головному екрані Taranis утримуйте кнопку page до входу в телеметричні екрани, далі потрібно проклацати цією ж кнопкою до потрібного номера екрана, де встановлений скрипт, після чого відобразяться ваші встановлені значення ПІД.

Ось і все, тепер ви можете легко і зручно налаштовувати ваш FPV дрон віддалено.



Коментарі
Реєстрація