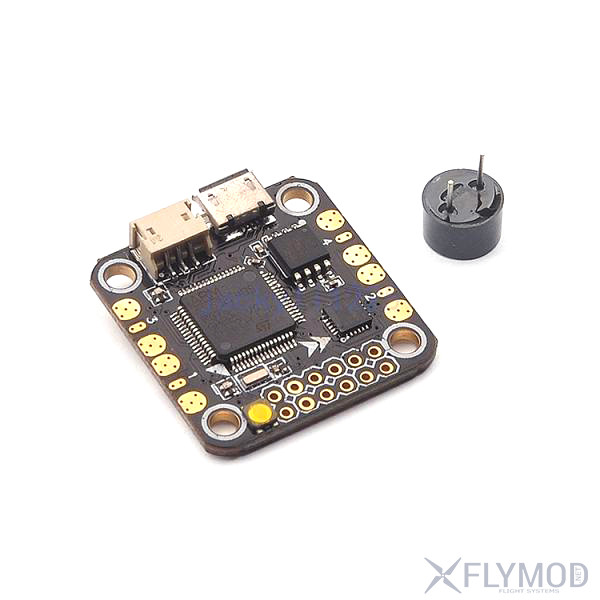
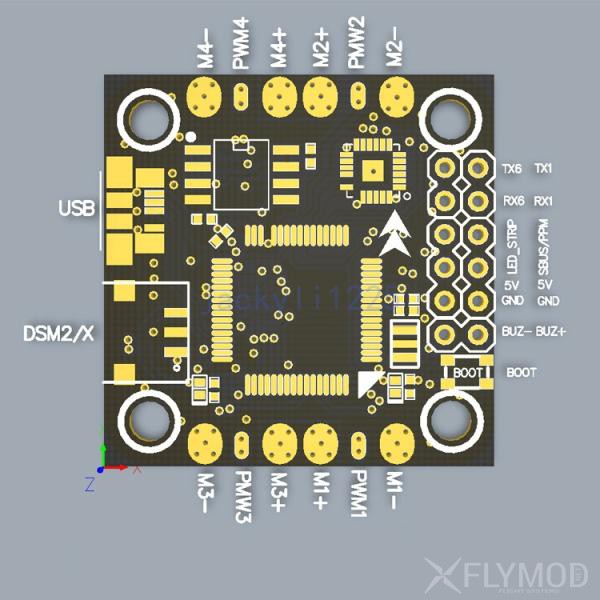
Контролер польоту Mini ACRO F4 для складання маленьких квадрокоптерів розміром 130 і менше.
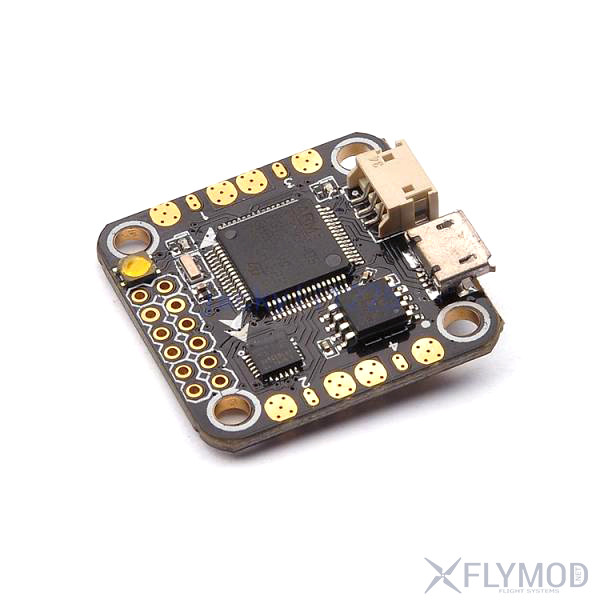
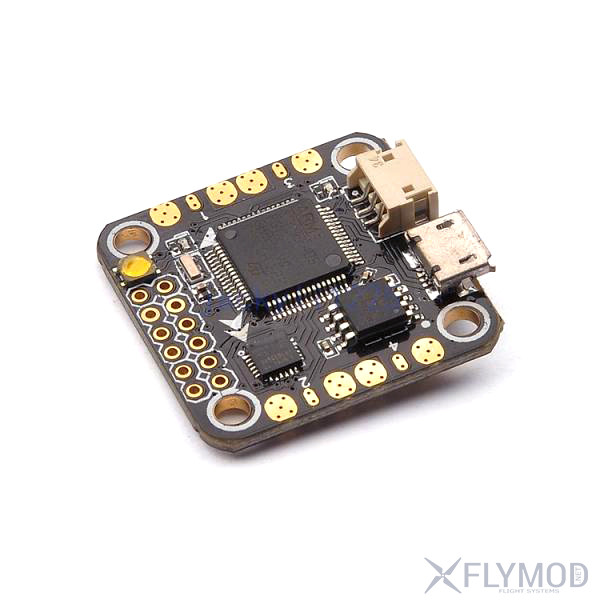
Маленький контролер польоту Mini F4 розміром 30x30 мм з монтажними отворами на 23x23 мм. Він також має вбудовану PDB, тому він може серйозно заощадити місце у вашому дрібнольоті. Гіроскоп на 8КГц дає всього 2-3% навантаження з акселерометром, включеним в Betaflight.
Особливості
Малі габарити дають можливість встановити на різні рами і конфігурації мікро квадрокоптерів
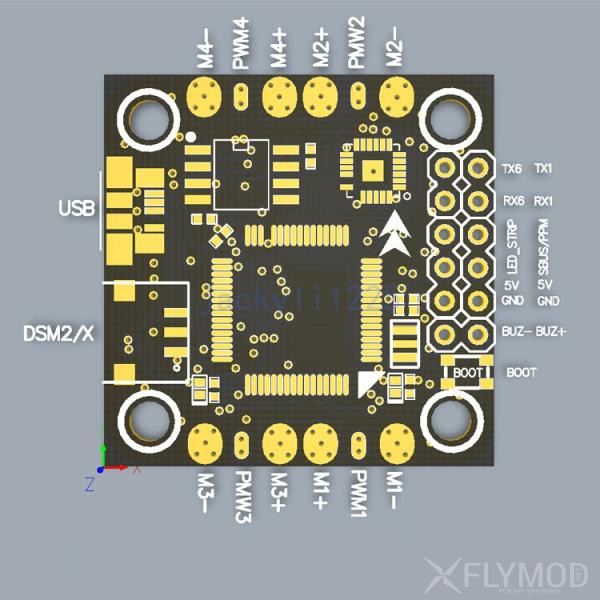
Хороший процесор STM32 F405, здатний працювати з усіма портами одночасно (USB + SmartPort + SBus + LED Strip + Battery Monitoring + 4 motors), у зв'язці з акселерометром\гіроскопом MPU6000, підключеним через шину SPI
128Мб флеш пам'яті
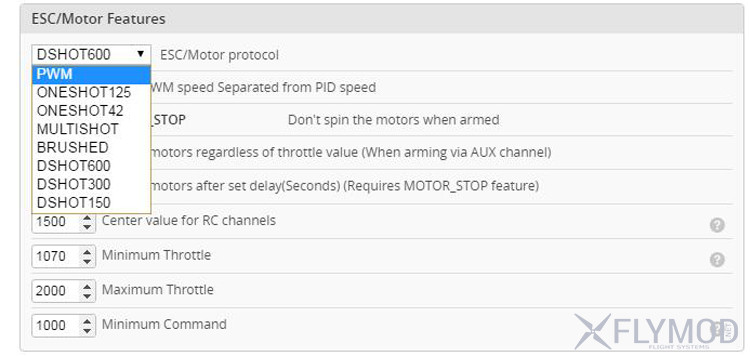
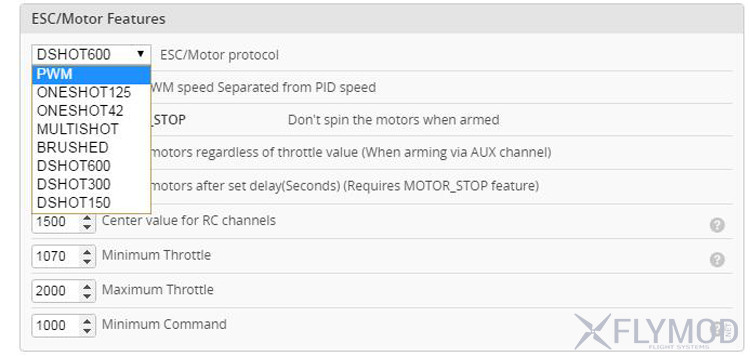
Підтримка протоколу Dshot (необхідно оновити прошивку до Betaflight 3.1 AirbotF4)
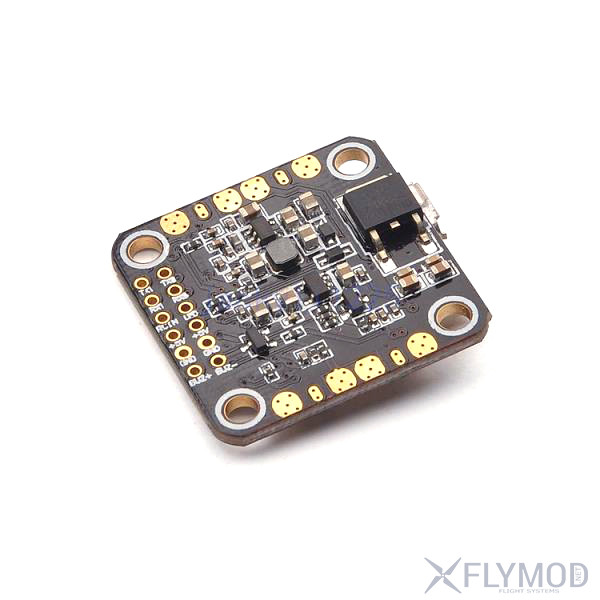
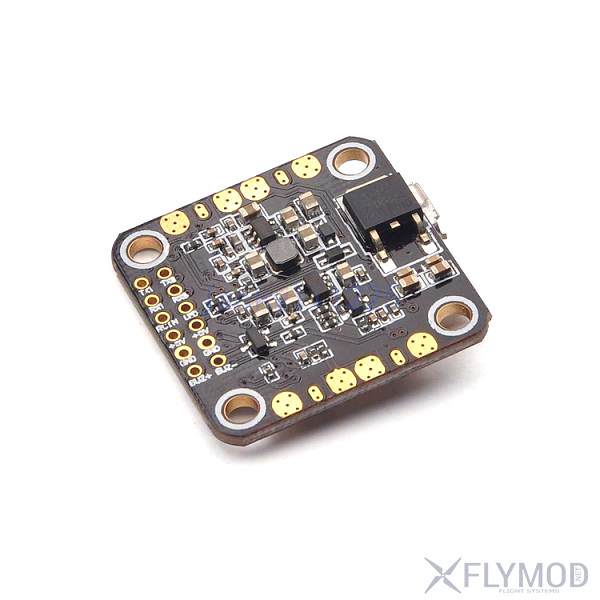
Вбудована плата розводки живлення з підтримкою 2S-4S LiPo
Підключення та налаштування контролера через Micro USB
Підключення пищалки\бузера прямо до плати
Підтримка акумуляторів - 2S-4S
Характеристики
Чіп: STM32 F405 CPU 32bit ARM @ 168MHz
Вбудована прошивка: BetaFlight 3.0.1 Target REVO
Підтримує прошивки: CleanFlight, BetaFlight, RaceFlight
О, у меня такой же уродец.
1. Отверстия 23*23 мм, нестандарт.
2. Слабый BEC 5V, выпаял микросхему и юзаю внешний.
3. Не работает LED strip, ибо разведена не на ту ногу процессора.
4. Кнопка boot развалилась при первом нажатии.











Огляди та обговорення
1. Отверстия 23*23 мм, нестандарт.
2. Слабый BEC 5V, выпаял микросхему и юзаю внешний.
3. Не работает LED strip, ибо разведена не на ту ногу процессора.
4. Кнопка boot развалилась при первом нажатии.
Реєстрація