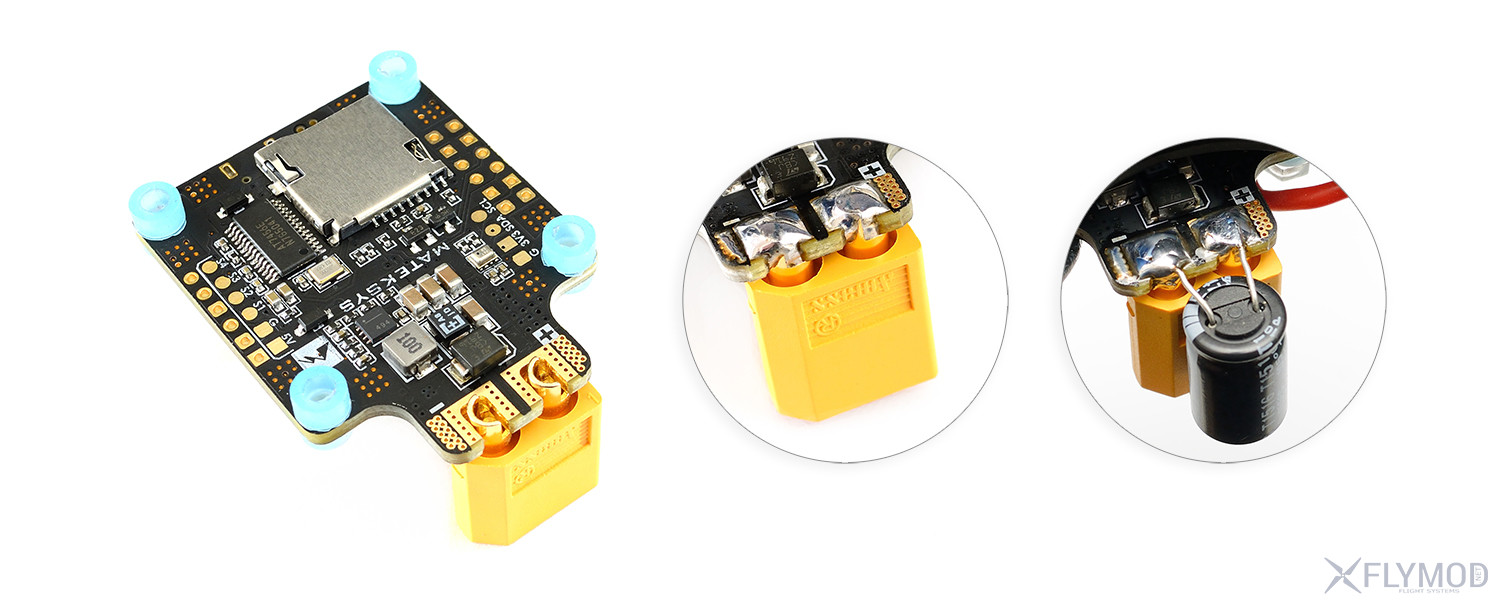
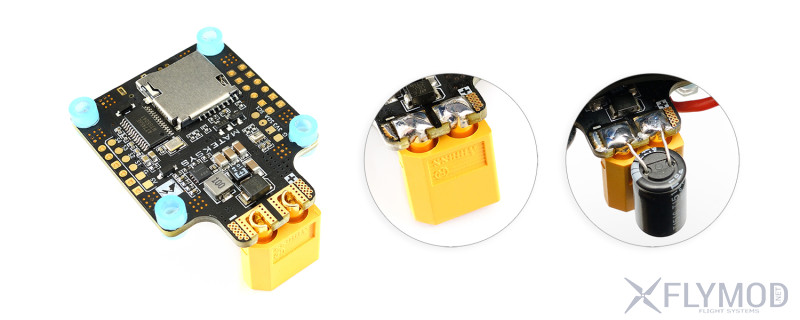
Matek представляє новий контролер польоту F405-CTR як заявку на найкращий F4 контролер у своєму класі. Порівняно з минулою версією AIO тут використано більш надійний IMU-сенсор, стійкий до вібрацій. Додано барометр для контролю висоти. На платі поруч із сигнальними доріжками для регуляторів швидкості додано контактні майданчики для телеметрії регуляторів. Завдяки монтажним отворам M4 із силіконовими прокладками можна заощадити більше місця в збірці. Також змінено дизайн доріжки під пайку XT60 для можливості зручнішого розташування.
Характеристики контролера
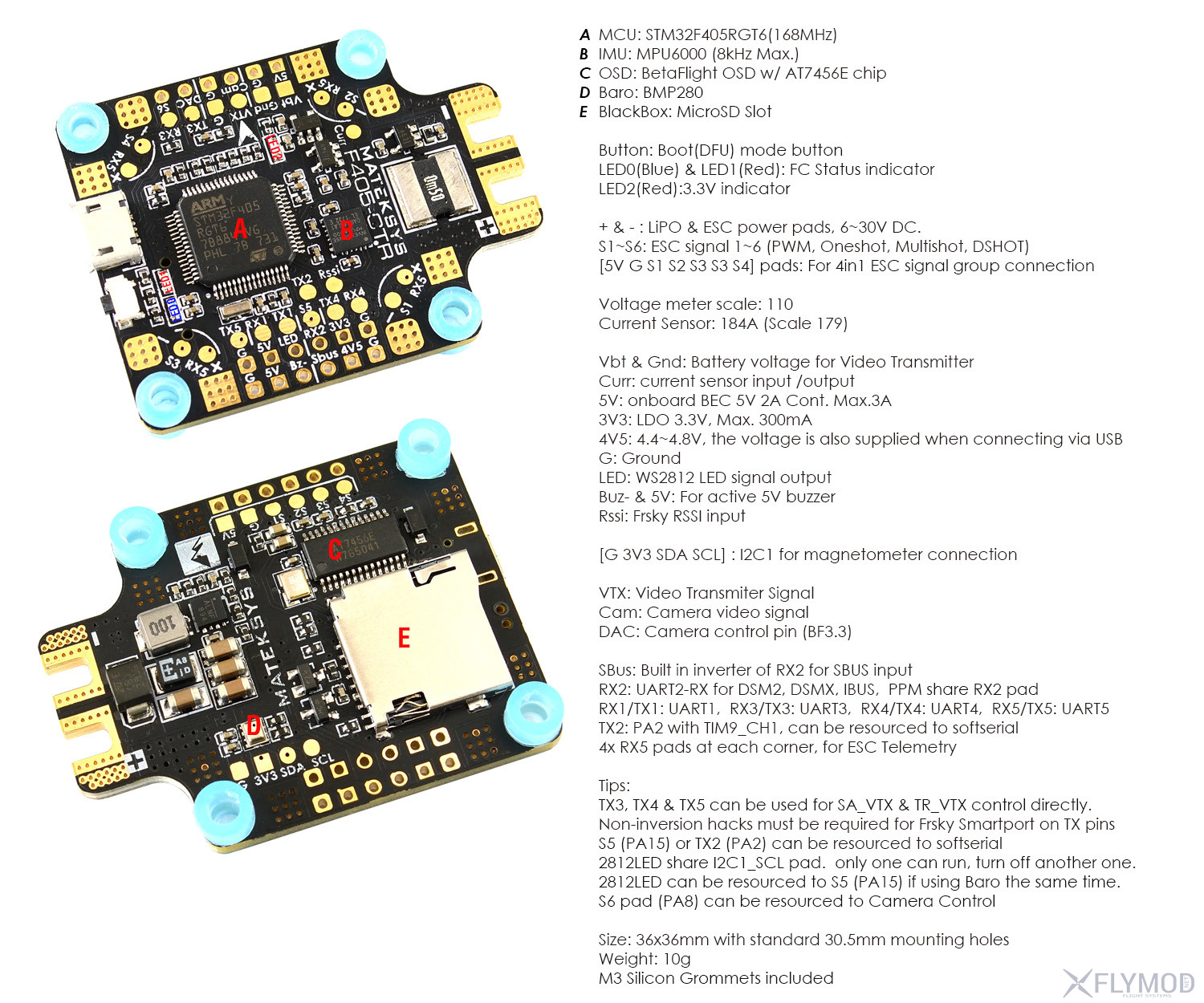
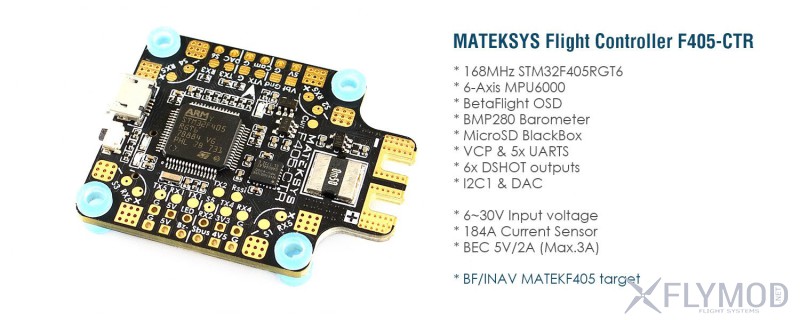
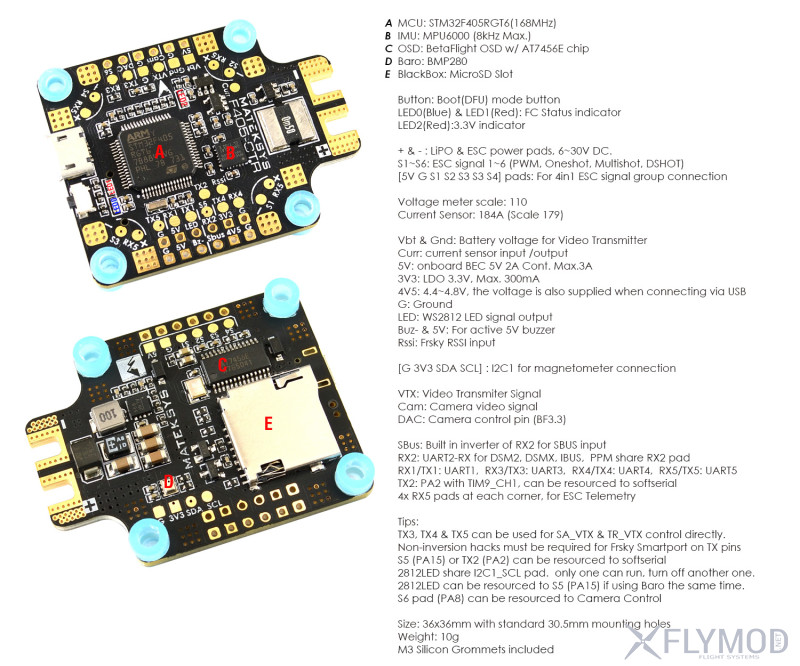
Чип: 168MHz STM32F405
IMU-сенсор: MPU6000 акселерометр / гіро
Барометр: BMP280 (I2C)
OSD: BetaFlight OSD на AT7456E
Запис логів: MicroSD карта (SD/SDHC)
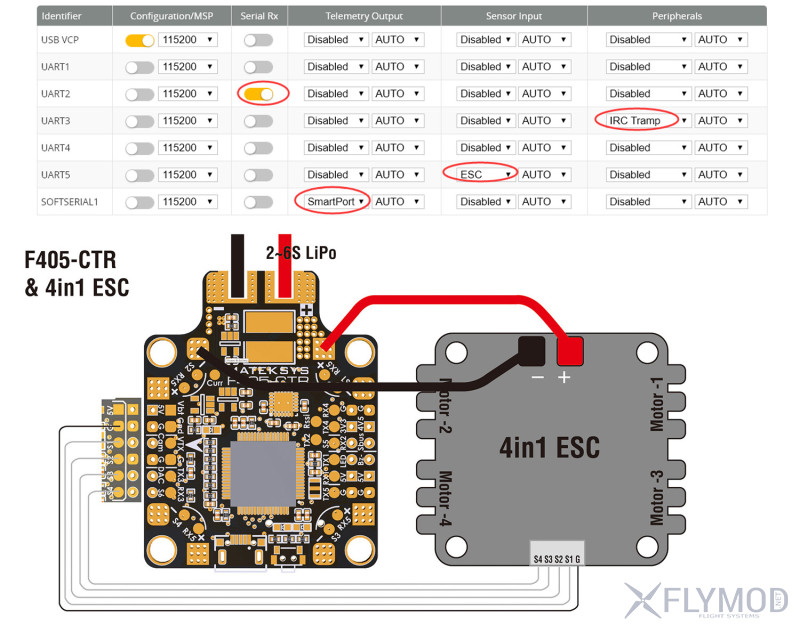
Інтерфейс: VCP, UART1, UART2, UART3, UART4, UART5
Вбудований інвентер для SBUS (UART2-RX)
PPM/UART Shared: UART2-RX
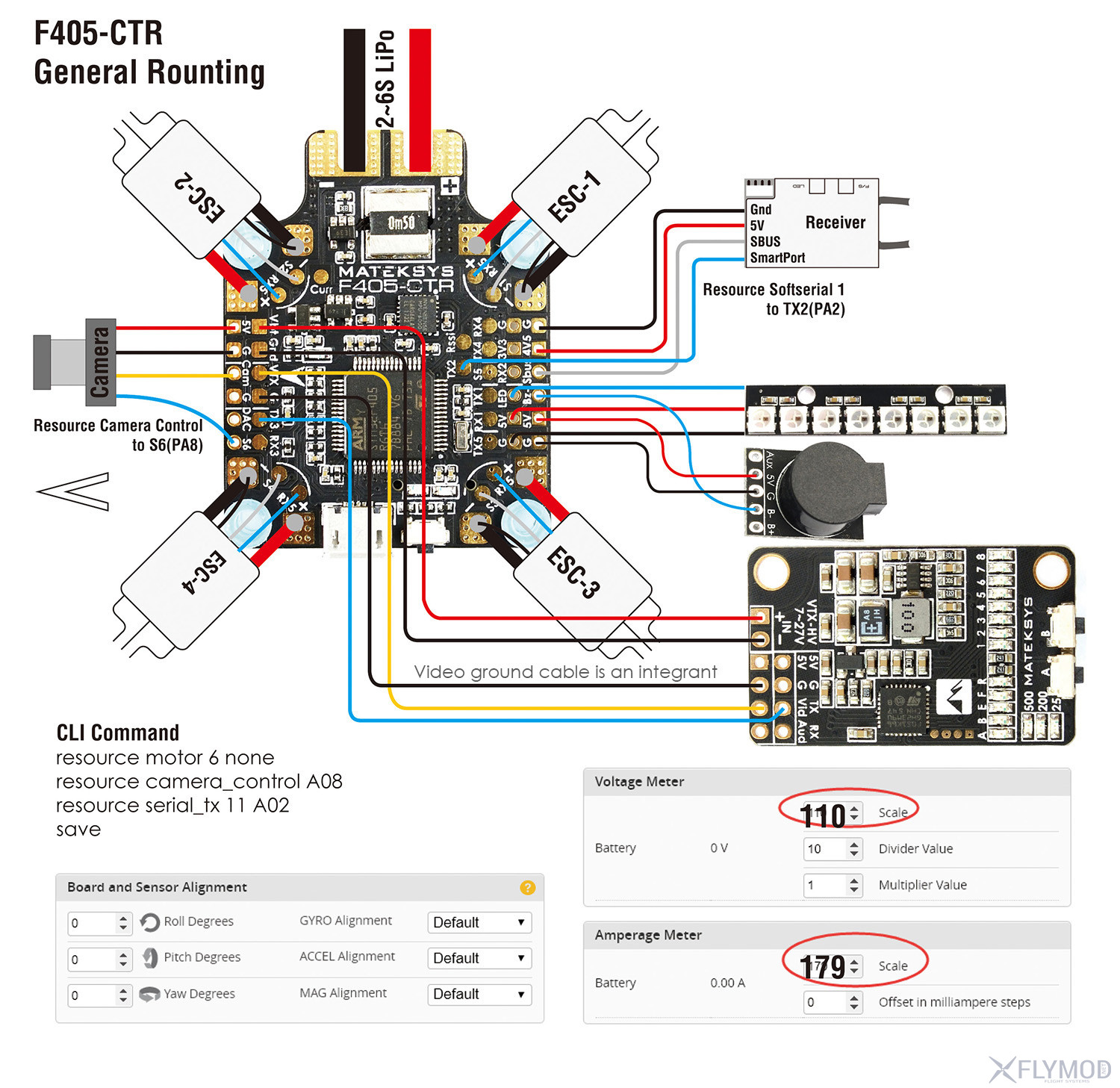
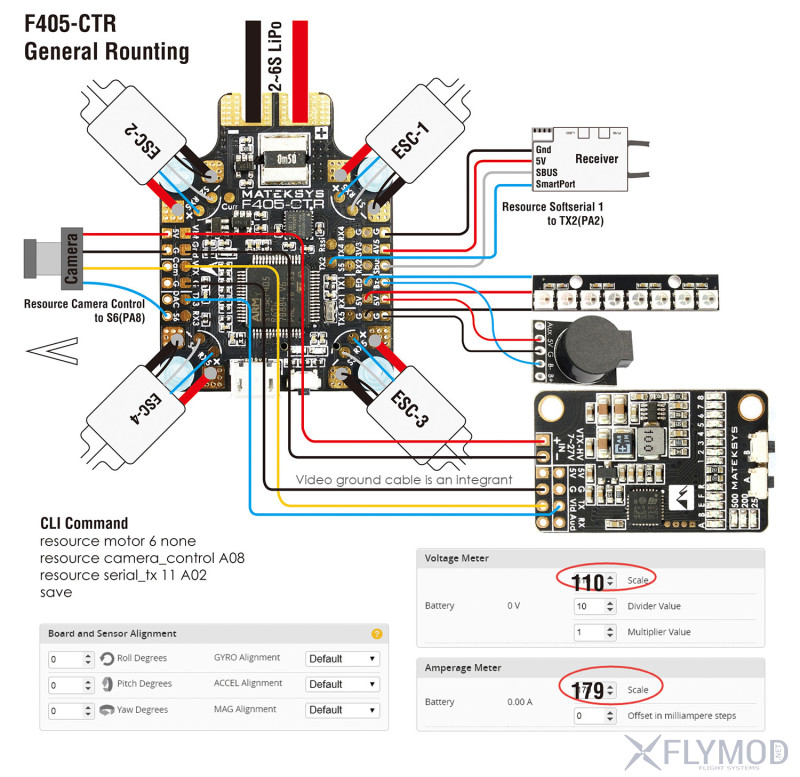
SoftSerial-порт на TX2, S5 або S6 (опціонально)
Camera control on S6 or DAC optional
Підтримка Smartaudio і Tramp VTX протоколу
Світлодіоди LED WS2812
Пищалка
RSSI: є
Розмір: 36 x 46 мм
Монтажні отвори: 30.5 мм
Вага: 10 г
Характеристики вбудованої PDB
Вхідне живлення: 6~30V (3~6S LiPo) із захистом від сплесків напруги
Kiev под каждым видео есть все контакты,на ВК,на группу,мыло в конце концов,так же не проблема найти на фэйсбуке,но надо писать сюда :)) Видео по настройке и прошивке Inav тоже есть...
Добрый день, помогите, у меня Matek F405-CTR, я установил драйвера, закачал прошивку Inav 1.8.0 но в диспетчер устройств он не определяется как com-port, а определяется как Matek- F4. Конфигуратор у меня Inav 1.8.1. Что я делаю не так.
feainn, дергания по yaw появляются при плохой виброизоляции или плохой фильтрации питания, у контроллеров с MPU6000 проблем меньше чем у старой версии.
подскажите. так понимаю что под inav к полетнику frsky smartport подключить нельзя, а соответственно и настраивать с пульта через luascript в поле тоже нельзя???
Юлиан Гиневский, на офф. сайте есть несколько вкладок со схемами для подключения. во вкладкие со схемами для inav нету ни одной схемы для подключения смарт порта. вопрос был именно про inav.
на бетафлайт попробывал, работает. но так-как у меня дальнолет то ... INAV.
Artem Makeiev, Из моего опыта на управление split можно и забить, т. к. работает криво. У меня GPS на rx1/tx1, split на rx3/tx3, smartport на tx4, передаван TBS на tx5. Пробовал softserial перебрасывать на motor 5, motor 6, led - не работает под INAV.
g40a, Еще один вопрос возник подскажите пожалуйста, передатчик Eachine TX526 камера FOXEER ARROW V3 подключение по черному красному и желтому (сигнал) проводу понятно, больше не какие провода паять не надо? Осд с таким подключением будет работать?
Григорий Кузнецов, Осд на плате контролера, паять как на картинке выше, главное что бы были правильно подключены черный и желтый провода, красный питание как удобно, тогда будет работать.
привет, подскажите куда копать,регули RS30A Lite и пк matek f405-ctr. Под бэтафлай работает нормально во всех режимах, под айнав ведет себя непредсказуемо в режимах энжил и горизонт(самопроизвольно набирает обороты практически на максимум). В настройках выбираю для регуляторов протокол DSHOT300. До покупки на флаймоде этого ПК на этом же сэтапе стоял аналогичной полетник заказанный с китая который работал отлично под айнавом. Может кто то подскажет куда можно посмотреть/покопать
bones, Самопроизвольный набор оборотов это в полете с пропелерами или на столе без пропелеров? Если в полете то нужно улучшить виброразвязку контроллера, переключить протокол на мультишот, подобрать нормальные пиды.
Здравствуйте.
Скажите, пожалуйста, писк на видео (37мин 30сек.), он должен быть всегда и это нормально?
Пищит пока не найдёт спутники, а потом нормально армится.
Пробовал прошивку 1.8 и 2.1.
Просто иногда ищит спутники с писком, а иногда без него!
F/s стоит возврат на точку старта.
Спасибо!
На осд пишет - нет спутников и всё!
Пищит пока идёт поиск спутников, но потом нормально армится.
Вот и не пойму - для inav норма это или нет?!
SOS. Случайно оторвал вход микро usb на полетнике. Содрало одну из дорожек. Припаять не возможно. Можно ли подключиться к INAV как то через контакты платы? Заранее спасибо ща помощь!
















Огляди та обговорення
на бетафлайт попробывал, работает. но так-как у меня дальнолет то ... INAV.
мое подключение:
tx1/rx1 - hc-12 (telemetry)
tx2 - должен был быть frsky smartport!!!!
tx3 - Matek VTX-HV
tx4/rx4 - gps beintian
tx5/rx5 - runcam split
Игорь Олишевский у Юлиана квадрик под betaflight (я так понял) и без gps модуля (влияет на количество свободных портов)
Скажите, пожалуйста, писк на видео (37мин 30сек.), он должен быть всегда и это нормально?
Пищит пока не найдёт спутники, а потом нормально армится.
Пробовал прошивку 1.8 и 2.1.
Просто иногда ищит спутники с писком, а иногда без него!
F/s стоит возврат на точку старта.
На осд пишет - нет спутников и всё!
Пищит пока идёт поиск спутников, но потом нормально армится.
Вот и не пойму - для inav норма это или нет?!
Реєстрація